KTC-Objekt
KTC:s DUCar programmeras genom att färdiga objekt konfigureras och kopplas ihop. Dessa objekt beskrivs på denna sida.
Varje KTC-Objekttyp har sin konfigureringssida (display eller Automate) och identifieras med två bokstäver och två siffror, t.ex. AI01. De två bokstäverna anger typ av objekt, i detta fall Analog Ingång, och siffrorna är ett index som säger vilken av flera likadana som avses. På display växlar man index med piltangent vänster respektive höger. KTC-Objekten är grupperade i olika block.
Beroende på vilken KTC-enhet du har till förfogande så finns ett antal av dessa block och KTC-Objekt tillgängliga.
Exempel på en färdig konfigurering hittar du här.
Man kan ibland behöva koppla till något annat värde än huvudvärdet. I Automate syns en lista till höger med tillgängliga värden. (För varje produkt finns också en fullständig lista i excelformat att ladda ner här )
Regleringar
P-band, I-tid och D-tid.
P-band:
P-bandet är det reglerfel som direkt ger fullt utslag, 100 %. Ett mindre p-band
ger snabbare reglering, men kan orsaka instabilitet, d.v.s. mellansnabba svängningar.
I ett RC-objekt innebär ett P-band satt till noll att reglersteget inte används.
I-tid:
Integreringstiden är den tid som det tar att integrera fram 100 % utsignal
med en regleravvikelse som är lika med p-bandet. Det innebär t ex att om avvikelsen
är en tiondel av p-bandet, kommer regler-signalen att öka med tio procentenheter varje I-tid.
Kortare i-tid ger snabbare reglering, men ökad risk för instabilitet, d.v.s. relativt
långsamma svängningar.
D-tid:
Om deriveringstiden är större än noll, kommer invärdets förändringshastighet att
påverka utslaget, genom att invärdet anses vara aktuellt invärde plus förändringshastigheten
gånger D-tiden. Man kan säga att d-tiden är ett försök att förutsäga vad reglerfelet kommer att
bli. D-faktorn kan rätt använd ge både större snabbhet och stabilitet. En för stor d-faktor
kan dock orsaka instabilitet d.v.s. snabba svängningar.
RL Reglerloop
En reglering skapar ett utvärde utifrån inställt börvärde och aktuellt ärvärde. Utsignalen begränsas av inställda max-och mingränser. Både in och utvärden kan ges en enhet. Utvärdet kan användas t ex till en analog ut, en trepunktsfunktion eller som invärde till en annan regulator. Utgångsvärdet kallas v1, t ex RL03v1.
Omvänd reglerriktning, t ex ett kylsteg, fås genom att i RL sätta max utsignal till ett lägre värde än min utsignal.
I RL går det också att ställa in en tolerans. Detta innebär att regleringen lugnar sig och, efter
en inställd efterjusteringstid, helt slutar att arbeta så länge felet håller sig inom den
satta toleransen. På så vis blir regleringen snabb, men ändå lugn vid stabila förhållanden.
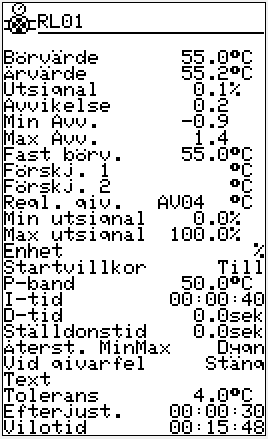
RL01
Reglerloop ett
Börvärde
Börvärde sammanräknat från valda signaler
Ärvärde
Aktuellt värde
Utsignal
Signal på reglerloopens utgång.
Avvikelse
Nuvarande avvikelse.
Min Avv
Största negativa avvikelse.
Max Avv
Största positiva avvikelse.
Fast börv.
Börvärdet ställs till ett fast värde, enhet beroende på vald Regl.giv.
Förskj. 1/Förskj. 2
Börvärden som kan väljas mellan alla värden i systemet, eller ställas till ett fast värde. Dessa värden adderas till det första.
Regl. giv.
Värdet som skall regleras kan väljas bland alla värden i systemet.
Min utsignal
Det värde som fås då regulatorn ger 0 %. Minvärdet kan vara större än eller mindre än maxvärdet. Båda värdena kan antingen väljas ibland systemets värden, eller vara fast inställda.
Max utsignal
Det värde som regulatorn går till vid 100 %
Enhet
Enhet för utvärdet, max- och minvärden följer automatiskt.
Startvillkor
Ett startvillkor kan väljas bland systemets olika värden, eller ställas till ett fast värde. Om det valda värdet är 0 ges alltid utsignal 0,oavsett inställda gränser för utsignal.
P-band
Se sidan 7, Regleringar Allmänt.
I-tid
Se sidan 7, Regleringar Allmänt.
D-tid
Se sidan 7, Regleringar Allmänt.
Ställdonstid
Gångtiden från 0-100% för ställdonet. Om ställdonet är långsamt i förhållande till det reglerade systemet/reglerobjektet, kan det vara bra för stabiliteten att regulatorn tar hänsyn till detta. Omställdonstiden sätts till 0 ignoreras detta värde.
Återst. MinMax
- Aldrig: Värdet på Min/Max återställs aldrig.
- Timme: Värdet på Min/Max återställs varje hel timma.
- Dygn: Värdet på Min/Max återställs kl. 11:00 varje dygn.
- Nu: Värdet på Min/Max återställs direkt, där efter återgår inställningen automatiskt till det val som var gjort på Återst. MinMax
Vid givarfel
Reaktionen på ett givarfel kan ställas, antingen till att ge utsignal 0, eller till att frysa utsignalen.
Text
Ramtext, visas högst upp på menysidan, på raden efter RL01.
Tolerans
Accepterat fel i reglering. 0 innebär normal reglering hela tiden. Kan vara ett fast eller ett rörligt värde.
Efterjust.
Tid för efterjustering efter att det stabila läget har inletts.
Vilotid Räknar tid sedan regleringen intädde i stabilt läge. När denna tid är större än efterjusteringstiden sker ingen reglering alls.
RC Sekvensreglering
Reglering i sekvens, med begränsning. RC är en PID-regulator som kan styra upp till fyra utgångar i sekvens. Utgångssekvenserna har individuella P-bandsinställningar men delar inställningar för I-tid och D-faktor. Varje sekvens kan ställas att ge ökande utsignal för ökande insignal (kylreglering) eller ökande utsignal för fallande insignal (värmereglering).
Varje reglersekvens har en egen börvärdesförskjutning, fast inställd, eller som ett hämtat värde. Den kan användas t ex för att skapa ett glapp mellan värme och kyla. Till utgångssekvenserna kan man, via AV, t ex koppla analoga utgångar AU, stegkopplare SK eller trepunkts-styrning AZ. Ett startvillkor styr starten av RC-blocket. RC har två givaringångar, huvudgivare och begränsningsgivare. Huvudgivaren bestämmer utstyrningen så länge som värdet från begränsningsgivaren befinner sig inom de satta gränserna. Frysskyddsfunktion finns också att tillgå (kopplas till AV).
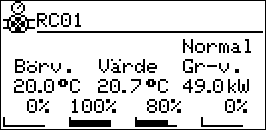
RC Översikt
Displayexemplet t.v. visar en reglering i tre steg, där det första steget är ett kylsteg. Det andra steget är ett värmesteg med 100 % utsignal och det tredje steget ett värmesteg med 80 % utsignal.
Man ser aktuellt börvärde, aktuellt invärde och aktuellt begränsningsvärde, samt utsignal för de fyra reglerstegen. Utsignalen som visas är den som utgången står på, även om den skulle vara handställd.
Menytangenten ger möjlighet att gå till sidan för RC Översikt,
sidan för konfigurering RC Inställningar, eller till sidan RC Info för data i tabellform.
RC Info
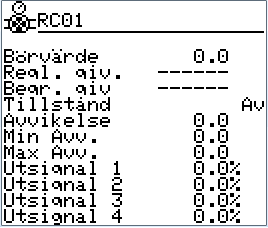
RC01
Sekvensreglering 01
Börvärde
Börvärde sammanräknat från valda signaler
Regl. giv.
Aktuellt invärde
Begr. giv
Aktuellt begränsningsvärde
Tillstånd
Tillstånd: Av, Normal eller Begr.
Avvikelse
Aktuell regleravvikelse
Min Avv
Minimal avvikelse.
Max Avv
Maximal avvikelse.
Utvärde 1 till 4
De fyra utvärdena från regulatorn, alternativt det handställda värdet.
RC inställningar
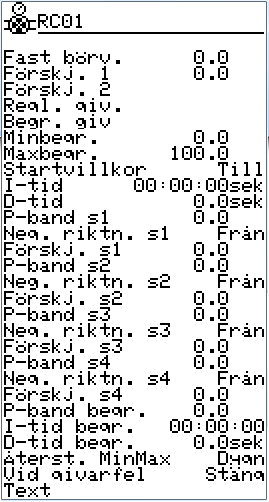
RC01
Sekvensreglering 01
Fast börv.
Börvärdet ställs till ett fast värde, enhet beroende på vald Regl. Giv.
Förskj. 1-2
Börvärden som kan väljas mellan alla värden i systemet eller ställas till ett fast värde. Dessa värden adderas till det första.
Regl. giv.
Invärdet väljas bland systemets samtliga värden.
Begr. giv.
Värde för begränsningsreglering väljas bland samtliga värden i systemet.
Minbegr.
Undre gräns för begränsningsregleringen väljas som ett fast värde eller bland samtliga värden i systemet.
Maxbegr.
Övre gräns för begränsningsregleringen väljas som ett fast värde eller bland samtliga värden i systemet.
Startvillkor
Ett fast värde eller vilket värde som helst väljs som startvillkor. Om startvillkoret är Av, eller lika med 0, ställs RC på första värmesteget, med alla utgångsvärden på 0.
I-tid
Integreringstiden. De fyra regulatorstegen har samma värde. Se sidan 7, Regleringar Allmänt.
D-tid Deriveringstiden (D-faktorn). De fyra regulatorstegen har samma värde.
P-band s1-s4
P-band för varje reglersteg. Varje steg har sitt eget p-band. Se sidan 7, Regleringar Allmänt.
Neg.riktn.s1-s4
Om Till fås kylreglering: större invärde ger större utvärde.
Förskj. 1-4
Ett värde som läggs till börvärdet. Olika för varje reglersteg. Se sidan 7, Regleringar Allmänt.
P-band begr.
P-band begränsningsregleringen. Se sidan 7, Regleringar Allmänt.
I-tid begr.
Integreringstid begränsningsregleringen. Se sidan 7, Regleringar Allmänt.
D-tid begr.
Deriveringstid begränsningsregleringen. Se sidan 7, Regleringar Allmänt.
Återst. Min Max
- Aldrig: Värdet på Min/Max återställs aldrig.
- Timme: Värdet på Min/Max återställs varje hel timma.
- Dygn: Värdet på Min/Max återställs kl. 11:00 varje dygn.
- Nu: Värdet på Min/Max återställs direkt, därefter återgår inställningen automatiskt till det val som var gjort på Återst. MinMax innan valet NU gjordes.
Vid givarfel
Hantering av givarfel kan ställas in. Om börvärde eller ärvärde blir ogiltigt reagerar regulatorn på ett av två sätt.
- Stäng: Reagerar som om startvillkoret blir falskt: stänger alla utgångar, och ställer sig på första värmesteget.
- Frys: Alla signaler står kvar där de var, tills giltiga värden kommer in igen, eller systemet startar om.
Text
Ramtext, visas högst upp på menysidan, på raden efter RC01.
KF Kaskadfunktion
Kaskadfunktionen används framförallt för att påverka börvärdet vid reglering av ramledningstemperatur, utifrån aktuellt värde på referensgivare. Om man vill kan man se det som en P-regulator med ställbart utsignalområde. Utsignalen är Faktor * (Börvärde – Ärvärde). Utvärdet begränsas av inställningar för min och max. Samtliga inställningar (utom enhet) kan kopplas till andra objekt.
KF01
Kaskadfaktor ett
Värde
Aktuellt utvärde
Ärvärde
Aktuellt invärde
Börvärde Inställt målvärde.
Insignal
Vald insignal för funktionen
Faktor
Kaskadfaktor. Högre värde ger starkare reaktion på avvikelse.
Min
Minsta tillåtna utvärde
Max
Högsta tillåtna utvärde
Enhet
Enhet på utvärdet, och på Min och Max.
Text
Ramtext, visas högst upp på menysidan, på raden efter KF04.
FV Frysvakter
Frysvakten används för att skydda aggregat med vattenbatterier mot frysrisk.
Faller temperaturen vid frysvaktsgivaren under inställd temperatur
utlöses ett larm. FV har en analog utsignal som kan kopplas till en
AV. Denna frysvaktssignal kommer att börja stiga när temperaturen
vid frysvaktsgivaren är 5°C över den inställda fryslarmstemperaturen.
Utsignalen stiger med 25 % per grad vilket innebär att ventilen är
fullt utstyrd när temperaturen är en grad över fryslarmstemperaturen.
Frysvakten har dessutom en varmhållningsfunktion, som bara arbetar då
regulatorn inte är aktiv. Vid aktiverad varmhållningsfunktion (normalt
när aggregatet står stilla) fungerar FV som en PI-regulator med P-band
på 20°C och en I-tid på en minut. Den kommer att styra den analoga utgången
för att hålla temperaturen vid frysvaktsgivaren vid det inställda
börvärdet. Varmhållningen kan förreglas av en valbar förreglingssignal.
FV01
Frysvakt ett
Frysgräns
Fryslarmstemperatur
Ärvärde
Temperatur vid FV-givare.
Utsignal
Aktuell utsignal
Utsignal FV
Utsignal frysvakt
Utsignal VH
Utsignal till ställdon för varmhållning.
VarmHålln.
Börvärde för varmhållningsregleringen.
Frysgivare
Val av insignalsignal för frysgivare.
Utgång (AV)
Till vilken styrsignal utvärdet ska gå
Fördröjning
Larmfördröjning
Startvillkor VH
Digital signal som kan stoppa varmhållning då den är Från.
Text
Ramtext, visas högst upp på menysidan, på raden efter FV01.
Hur en frysvakt används i KTC
Frysgivaren ska vara en AV. Då kommer ett A-larm på denna AV att aktiveras, och larmgräns för låglarm kommer att hållas på den inställda frysgränsen. Eventuella larmförregleringar kopplas bort, och larmfördröjningen kopieras från inställningarna i FV.
Frysvaktens utsignal ska kopplas till den AV som används som regulatorutgång, som Minbegränsning. Den signal som ska användas heter t.ex. FV02v0. Detta görs genom att i inställningarna för frysvakten ställa Utgång (AV) till önskat AV-objekt. Då kommer kopplingen också att bli direkt synlig från båda håll. (Om man bara kopplar in frysvakten genom att ställa in AV:s minbegränsning, kommer varmhållningen inte att fungera korrekt.) FV har ytterligare två utgångssignaler, en för frysvakt (tex FV02v1) och en för varmhållning (tex FV02v2). Värdet av FV02v0 är det högre av de två andra.
Analogt
AV Analoga värden
Analoga värden är värden med namn och inställbar enhet. De kan t ex användas som in-/utvärden i regleringar.
Värdet kan handställas och det loggas med inställt intervall till trendlogg.
Även analoga larm programmeras här. Om frysvakt används, ställs minbegränsning här (Ex: FV01v0, görs
automatiskt av frysvakten)
En programmering kan normalt göras utan att man använder AV, om man bara ser till funktion. Med att använda AV uppnår man ändå vissa fördelar, förutom ovan nämnda funktioner.
- Det blir lättare att kopiera funktion mellan olika DUC-program om vald ingång eller utgång inte är en del av funktionen.
- Om en ingång som används av flera objekt (såsom utegivare) tas in i en AV blir det enklare om man av någon anledninga ska flytta ingången till en annan fysiskt ingång. Utegivaren kan ju t ex behöva flyttas från en UI till en VK (om den ska hämtas från annan DUC).
- Man kan koppla en AV till valfritt värde i systemet, och då få möjlighet att larma för det, och dessutom få en trendlogg på värdet.
AV01
Analogt värde 01
Värde
Aktuellt utvärde
Larm
Status på larm.
Min
Lägsta analoga utvärde
Max
Högsta analoga utvärde
Signalval
Invärde väljs bland alla systemets analoga värden, eller ställs till ett fast värde.
Minbegr./Maxbegr.
Utvärdet kan begränsas till att ligga inom inställda gränser. Gränserna kan ställas till fasta värden, eller hämtas från valfritt värde i systemet.
Enhet
Enheten väljs från en lista med enheter.
Återst. Min Max
- Aldrig: Värdet på Min/Max återställs aldrig.
- Timme: Värdet på Min/Max återställs varje hel timma.
- Dygn: Värdet på Min/Max återställs kl. 11:00 varje dygn.
- Nu: Värdet på Min/Max återställs direkt, där efter återgår inställningen automatiskt till det val som var gjort på Återst. MinMax innan valet NU gjordes.
Manöver
Auto/Hand.
Hand
Utvärde vid Manöver i Hand.
Villk. min
Ett digitalt villkor kan tvinga AV att anta sin inställda minbegränsning.
Villk. Max
Ett digitalt villkor kan tvinga AV att anta sin inställda maxbegränsning.
Text
Ramtext, visas högst upp på menysidan, på raden efter AV01.
Kategori
Gruppering av data, användbart t ex för datainsamling
Tag
Ett tekniskt namn, som kan användas t ex till datainsamling.
Larminställningar
AV16
Analogt värde 16
Larm
Status på larm. Talar också om om det gäller hög- låg-, eller givarfelslarm, samt status för larmsändning.
Larmprio
Larmets prioritet: Av, C, B eller A
Höglarm
Övre larmgräns
Låglarm
Undre larmgräns
Förregling
Digital signal som ska vara Till för att larmet ska beaktas.Ogiltigt värde anses Till.
Fördröjning
Tid med alla villkor uppfyllda innan larmet utlöses.
På
Tidpunkt då larmet gick från OK till aktivt.
Kv
Tidpunkt då larmet först kvitterades.
Åt
Tidpunkt då larmet senast återgick.
Antal larm
Antal ggr larmet varit aktivt sedan det var OK.
AQ Analoga beräkningar
Fem invärden, med varsin konstant räknas ihop till ett analogt värde. Även konstanterna kan, om man så vill, ställas till värdereferenser, för ökad flexibilitet.
I meny AQ översikt kan man ställa önskad funktion samt alla konstanter och invärden.
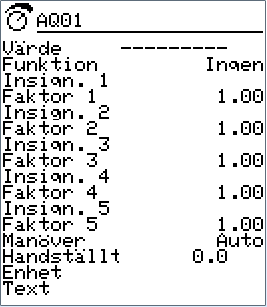
Värde
Utsignal
Funktion
Se förklaring funktioner nedan
Insignal 1-5
Valda signaler
Faktor 1-5
Faktor för vald funktion och vald signal. Manöver Auto/Hand
Handställt
Värde vid handställd.
Enhet
Enhet på värde
Text
Ramtext, visas högst upp på menysidan, på raden efter AV01.
Funktioner
Max
Det största värdet faktor * invärde plockas ut.
Min
Det minsta värdet faktor * invärde plockas ut.
Medel
Medelvärdet av invärdena returneras, viktat med sina konstanter.
Medelmitt
Som medel, men största och minsta invärdet ignoreras. Mindre än tre invärden ger ogiltigt resultat.
Summa
Alla giltiga konstant * invärde summeras.Observera att konstanter kan sättas till negativa tal, för att kunna beräkna differenser.
Diff
Första faktor * invärde läggs till, övriga dras ifrån. Par med något ogiltigt värde ignoreras.
VerGra
Verkningsgrad. En indikation på Verkningsgraden hos en värmeväxlare kan fås genom att temperaturskillnaden på primär och sekundärsidan jämförs.
Om tre invärden är definierade beräknas verkningsgraden enligt: (v1 – v3) * 100 % /(v2 – v3). Om fyra värden finns: (v1 – v2) * 100 % / (v3 – v4).
Om någon skillnad blir mindre än 0, fås verkningsgrad 0.
Om verkningsgraden blir över 100 % inverteras värdet. Konstanter används inte.
Multipl.
Alla giltiga konstanter och invärden multipliceras.
Division
Det första konstant * invärde divideras med alla övriga giltiga konstanter och invärden.
Daggpkt
Daggpunktsberäkning. Invärde 1 antas vara aktuell temperatur i grader Celsius, invärde 2 relativ luftfuktighet i %. Övriga invärden och alla konstanter ignoreras.
Tr->Fl.
Tryck till flödesomräkning. Flödet genom/förbi ett hinder (såsom en ventil) beror på trycket på ett förutsägbart sätt.
Funktionen utgår ifrån att det gäller vattentryck i Bar, men kan användas också för luftflöden. Se nedan.
Vatten:
- Invärde 1: Tryckfallet i Bar.
- Konstant 1: KV-Värdet (= flödet vid 1 Bar tryckfall, m3/h).
- Konstant 2: Skalning. Ett steg innebär att utvärdet skalas 10 ggr
- Utvärde: Vattenflöde i samma enhet som KV-värdet, normalt m3/h.
Luft:
- Invärde 1: Tryckfallet i valfri enhet.
- Konstant 1: Flödet vid trycket 1.00 i vald enhet.
- Konstant 2: Skalning. Ett steg innebär att utvärdet skalas 10 ggr. Kan användas för att hjälpa till om konstant 1 inte räcker till. Sätt till 0 om den inte behövs.
- Utvärde: Flöde i samma enhet som värdet i Konstant 1 (korrigerat med skalning enligt konstant 2).
Det är oftast svårt att i förväg veta vilket flödet blir vid ett visst tryck i ett ventilationssystem. Kalibrera därför med Konstant 1 (och ev. Konstant 2) gentemot gjorda flödesmätningar vid något givet tryck.
(Flödet beräknas enligt konstant 1 * rot(invärde 1) * 10 ^ konstant 2.)
Filter
Ett filter för mycket långa filtertider. Invärde 1 filtreras med en tidkonstant beräknad enligt: konstant 4 dygn + konstant 3 timmar + konstant 2 minuter + konstant 1 sekunder. Filtertider på upp till flera år är möjliga. Man kan för hand ställa filtrets utvärde, och filtrering fortsätter då från det ställda värdet.
COP
”Coefficient of Performance” för tex värmepumpar. Kvoten mellan avlämnad effekt och tillförd (elektrisk) effekt beräknas. Resultatet beräknas som summan av invärde 1 och 2, delat med invärde 3: (v1+v2)/v3. Resultatet kan begränsas inom ett rimligt område, med faktor 4 som max och faktor 5 som min. Om invärde 4 blir noll, fryses utvärdet (startvillkoret).
Gradminut
Skillnaden mellan invärde 1 och 2 ackumuleras. Resultatet kan begränsas med faktor 3 som max och faktor 4 som min. Invärde 3 kan användas som startvillkor (då värdet är 0 stoppas ackumuleringen). Invärde 4 kan användas för återstart. Om detta värde blir noll, nollställs utvärdet, ackumuleringen får börja om från noll.
AT Medelvärde (beräkning med många invärden)
AT beräknar medelvärdet (eller annan funktion) av ett större antal invärden. (Namnet kommer från "Average Temperature".) Man kan välja att undanta ett antal högsta och lägsta värden. Vid beräkning undantas också värden med givarfel, eller med värde utanför inställda gränser. Blir det för få värden kvar blir utvärdet givarfel.
Invärden väljs genom att ställa in ett första värde (objekttyp, index och egenskap). Sedan ställer man in antal värden och ett index-steg. AT tar första värdet, ökar objekt-index med inställt steg, och tar motsvarande värde med detta index. Upprepas tills antal invärden är uppe i det inställda antalet.
AT kan t ex användas för att beräkna medelvärdet av alla lägenhetstemperaturer via MBus. Anta att varje lägenhet har en elmätare, en varmvattenmätare och en temperaturgivare, alla via MBus. Den första temperaturgivaren har index 3. Ställ "Invärde 1" till MB03v1, "Antal indata" till antal lägenheter, och "Index-steg" till 3 (3 mätare per lägenhet). Om så önskas kan man välja bort t ex de tre kallaste och de tre varmaste lägenheterna. Man kan också välja bort temperaturer man tycker är extrema, t ex under 18°C eller över 30°C. AT beräknar sedan medelvärdet för alla icke undantagna givare.
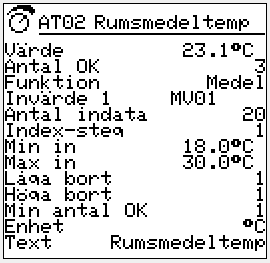
AT01
Medelvärdesberäkning ett
Värde
Aktuellt utvärde
Antal OK
Antal värden som ingår i beräknat medelvärde. Detta efter att högsta och lägsta värden,
samt värden med givarfel, tagits bort.
Funktion
Vilken funktion som ska utföras på de valda invärdena. Val mellan:
- Ingen: AT avstängd, utvärde blir givarfel.
- Max: Det högsta av de giltiga invärdena blir utvärde.
- Min: Det lägsta av de giltiga invärdena blir utvärde.
- Medel: AT beräknar medelvärdet av alla giltiga invärden. Detta är fabriksinställning.
- Summa: AT beräknar summan av alla giltiga invärden.
- &: Logiskt OCH. AT blir Till om alla giltiga invärden är Till.
- |: Logiskt ELLER. AT blir Till om något av de giltiga invärdena är Till.
Invärde 1
Referens till det första värdet. (Om man här skulle skriva in ett fast värde, så
kopieras det till utgångsvärdet, och Antal OK sätts till samma som inställningen Min antal OK.)
Antal indata
Antal värden som ska vara invärden, inklusive dem som eventuellt tas bort som
högsta eller lägsta. Kan också vara ett rörligt värde.
Index-steg
Ökning av objekt-index mellan varje invärde.
Min in
Lägsta tillåtna invärde. Lägre värden än detta betraktas som givarfel.
Max in
Högsta tillåtna invärde. Högre värden än detta betraktas som givarfel.
Låga bort
Antal lägsta värden som ska undantas från beräkningen. Max 20. Kan också vara ett rörligt värde. (Används inte för | eller &.)
Höga bort
Antal högsta värden som ska undantas från beräkningen. Max 20. Kan också vara ett rörligt värde. (Används inte för | eller &.)
Min antal OK
Minsta antal OK indata för att ge giltigt utvärde. För | eller & blir utvärde Från om antal värden är mindre, men flaggan för givarfel blir Till.
Enhet
Utvärdets enhet. Om inget ställs in används det första invärdets enhet.
Text
Ramtext, visas högst upp på menysidan, på raden efter AT01.
LR Linjära beräkningar
Linjär reglering LR skapar ett analogt värde som följer en linjär funktion. Funktionen skapas med en insignal och två invärde/utvärde par. Både in- och utvärden kan väljas som värdereferenser. Man kan alltså t ex låta en digital insignal avgöra vilken av två analoga signaler som skall bli utvärdet, eller skapa ett medelvärde mellan två analoga signaler, med rörlig viktning, osv.
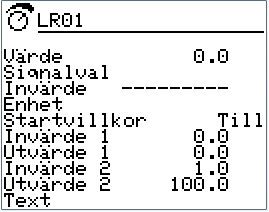
LR01
Linjär reglering ett
Värde
Aktuellt utvärde
Signalval
Invärde för funktionen. Om invärdet är digitalt räknas Till som Ett och Från som Noll.
Invärde
Aktuellt invärde
Enhet Valbar enhet på utvärdet.
Startvillkor
Fast ställt eller värdereferens. Om Från blir utvärdet 0.
Invärde 1 och 2/Utvärde 1 och 2
Två par av värden. Alla värden kan vara fasta värden eller referenser till andra värden. Det finns inga krav på ordning mellan värdena. Om båda invärdena är lika, väljs utvärdet till utvärde 1.
Text
Ramtext, visas högst upp på menysidan, på raden efter LR01.
KV Kurvor
Kurvfunktionen används t.ex. för att skapa en yttertemperaturberoende börvärdeskurva vilket är vanligt förekommande vid styrning av radiatorgrupper. Upp till nio värdepar kan anges. Den skapade styrkurvan består av linjära segment. Utvärdet är begränsat till mellan första och sista utvärdet. Enhet för utvärdet kan ställas in, enhet för invärdet tas från det refererade värdet. Vid givarfel ställs utvärdet till det handstyrda värdet.
OBS! Koordinatparen måste anges med antingen fallande eller stigande insignalvärden.
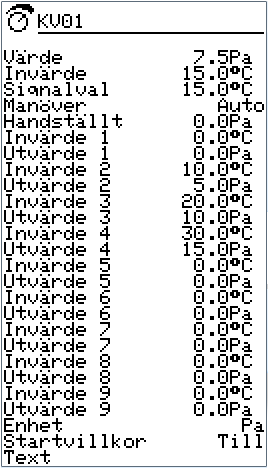
KV01
Kurva 01
Värde
Aktuellt utvärde
Invärde
Aktuellt invärde
Signalval
Vald insignal för funktionen
Manöver
Auto/Hand
Handställt Utvärde vid Manöver läge Hand.
Invärde 1-9/Utvärde 1-9
Par av in- och utvärden kan ställas. Värdepar på slutet med invärden som är lika, eller som bryter storleksordningen från de två första, ignoreras.
Enhet
Enhet för utvärdet kan väljas
Startvillkor
Fast ställt eller värdereferens. Om Från Blir utvärdet 0.
Text
Ramtext, visas högst upp på menysidan, på raden efter KV01.
WR Skrivobjekt
Skrivobjektet används för överstyrning av DUC från ett överordnat system. Vi rekommenderar att DUC hämtar överstyrningsvärden med hjälp av en VK. Ibland är detta dock inte möjligt, och därför finns även WR.
(Man får aldrig låta överordnade system kontinuerligt skriva en parameter/inställning, t ex ett handställningsvärde. Parametrar lagras på ett sätt som tål ett begränsat antal skrivningar under produktens livstid (ca 100 000), skrivning av nytt värde t ex varje timma kommer inom få år därför att göra DUC:en obrukbar. WR däremot lagrar det skrivna värdet i minne som kan skrivas hur mycket som helst.)
WR startar i defaultläge, och antar då det inställda defaultvärdet (som kan vara ett rörligt värde från annat objekt). Då ett värde skrivs (t ex via Modbus eller SRDLink) till skrivvärdet, ser WR det och börjar att med den inställda tiden rampa sitt värde mot det skrivna värdet. Värdet justeras sedan direkt vid varje skrivning.
Skulle det inte komma någon mer skrivning innan den inställda time-outtiden går WR över till att rampa ut, att stegvis återgå till defaultvärdet.
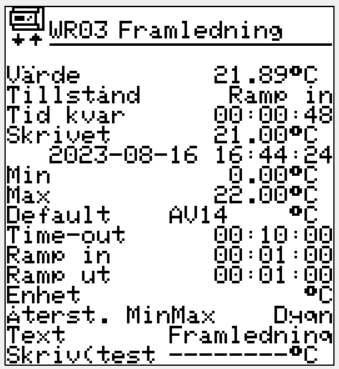
WR03
Skrivvärde 3. Rubriktexten ställs in på raden för text längre ner.
Värde
Aktuellt utvärde
Tillstånd
Vad WR håller på med just nu:
- Default: Ingen skrivning har ännu skett, eller WR har timeat ut.
- Ramp in: Skrivning har skett från defaultläge, och WR håller på att närma sig det skrivna värdet.
- Ramp ut: WR har timeat ut, och ändrar stegvis värdet mot det inställda defaultvärdet.
- Aktiv: En giltig skrivning finns, och WR kopierar kontinuerligt det senast skrivna värdet till utvärdet.
Tid kvar
Tidräknare. Här visas tiden till nästa tillståndsförändring. Alltså återstående
tid till time-out, eller återstående ramp-tid om WR håller på att rampa in
eller ut.
Detta värde kan skrivas om man t ex vill skynda på processen i en testsituation.
Skrivet
Senast skrivna värde. På raden efter står datum och tid då detta skedde.
Min
Lägsta utvärde som WR haft sedan återställning.
Max
Högsta utvärde som WR haft sedan återställning.
Default
Inställning för defaultvärde. Fast eller rörligt värde.
Time-out
Max tid mellan skrivningar innan WR börjar rampa tillbaka mot default.
Ramp in
Tid för att rampa från default till det först skrivna värdet. WR räknar ut
hur stora steg som ska tas utifrån hur lång tid det är kvar tills att målet
ska vara nått.
Ramp ut
Tid för att rampa från det senast skrivna värdet till default. WR räknar ut
hur stora steg som ska tas utifrån hur lång tid det är kvar tills att målet
ska vara nått.
Enhet
Enhet för det värde som skrivs.
Återst. MinMax
Inställning för när min- och maxvärden ska återställas till nuvarande värde.
Aldrig, varje timma eller varje dygn. Om man väljer 'Nu' återställs min och
max, och inställningen återgår sedan till tidigare värde.
Text
Här kan man ställa in RAM-texten.
Skriv(test)
Här kan funktionen testas genom att manuellt ställa skrivvärdet.
I Automate ser man vad som senast skrevs, i display visas detta bara på "Skrivet"
Digitalt
DV Digitala värden
DV är ett generellt internt digitalt värde. Även om det valda invärdet skulle vara analogt (t ex en AI digitalt använd), blir utvärdet alltid digitalt. DV kan också tilldelas texter som motsvarar status Till och Från, tillgängliga som värdet DVnnvt.
Här programmeras digitala larm. Värdet loggas vid förändring, och det kan handställas.
En programmering kan normalt göras utan att man använder DV, om man bara ser till funktion. Med att använda DV uppnår man ändå vissa fördelar, förutom ovan nämnda funktioner.
- Det blir lättare att kopiera funktion mellan olika DUC-program om vald ingång eller utgång inte är en del av funktionen.
- Om en ingång som används av flera objekt tas in i en DV blir det enklare om man av någon anledninga ska flytta ingången till en annan fysiskt ingång.
- Man kan koppla en DV till valfritt värde i systemet, och då få möjlighet att larma för det, och dessutom få en trendlogg på värdet.
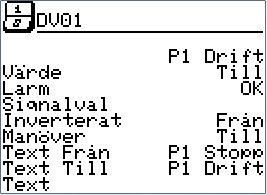
DV01
Digitalt värde ett
(Egen statustext skrivs vid Text Till och Text Från.)
Värde
Aktuellt status på utsignal.
Larm
Indikering av larmstatus.
Signalval
Vald insignal för funktionen
Inventerat
Möjlighet att inventera digital nivå.
Manöver
Auto/Till/Från
Text Från
Egen status text vid värde Från
Text Till
Egen statustext vid värde Till
Text Ramtext, visas högst upp på menysidan, på raden efter DV01.
Larminställningar:
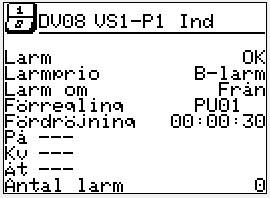
DV08
Digitalt värde 8
Larm
Status på larm. Talar också att det är ett digitalt larm, samt status för larmsändning.
Larmprio
Larmets prioritet: Av, C, B eller A
Larm om
Om larmet ska aktiveras då värde är Till eller Från.
Förregling
Digital signal som ska vara Till för att larmet ska beaktas. Ogiltigt värde anses Till.
Fördröjning
Tid med alla villkor uppfyllda innan larmet utlöses.
På
Tidpunkt då larmet gick från OK till aktivt.
Kv
Tidpunkt då larmet först kvitterades.
Åt
Tidpunkt då larmet senast återgick.
Antal larm
Antal ggr larmet varit aktivt sedan det var OK.
TR Tidreläer
TR styrs av valfri digital signal. Tidreläer används för att få fördröjningar på digitala signaler. Både tillslags- och frånslagsfördröjningar kan väljas. Tidreläet kommer enbart att växla om insignalen är oförändrad vid fördröjningstidens utgång. Det går också att ställa in flankstyrning på positiv eller negativ flank. Vid flankstyrning är tillslagsfördröjning inte aktiverat. TR kan användas som insignal vid digital villkorsstyrning, för förregling och som insignal till LR-block.
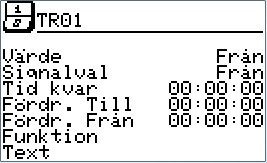
TR01
Tidrelä 01
Värde
Aktuell status på utgång, Till/Från.
Signalval
Invärde kan väljas bland alla systemets digitala signaler, eller sättas Till eller Från.
Tid kvar
Tid kvar till ändring av status
Fördr. Till
Vid nivåstyrning fördröjs tillslaget med inställt värde.
Fördr. Från
Vid nivåstyrning fördröjs frånslaget med inställt värde. Vid flankstyrning blir pulslängden det inställda värdet.
Funktion
Ställer styrningstyp: Nivå, positiv flank eller negativ flank.
Text
Ramtext, visas högst upp på menysidan, på raden efter TR01.
DQ Digitala beräkningar
DQ ger möjlighet att kombibnera olika digitala signaler med en enkel formel. De används främst för att kunna skapa komplexa styrvillkor genom att använda ett eller flera DQ-block som insignaler till andra DQ- eller DU-block.
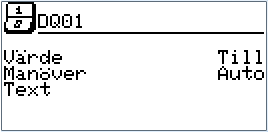
DQ01
Fixpunkt 01
Värde
Aktuell status på utgång, Till/Från.
Manöver
Auto, Till, Från, Set/reset.
Text
Ramtext, visas högst upp på menysidan, på raden efter DQ01.
Boolsk programmering
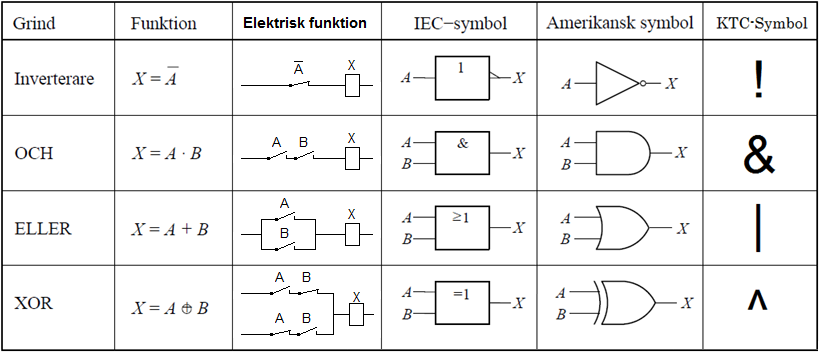
Genom att trycka på menytangenten och markera raden Formler kommer man till sidan för att mata in ett boolskt uttryck för fixpunkten. Det är en formel innehållande upp till fyra digitala signaler. Varje signal kan inverteras. Signalerna är grupperade i två grupper. Först beräknas värdet för grupp ett och värdet för grupp två, sedan räknas de båda gruppernas värde ihop till ett slutligt värde. Resultatet kan vara 1,0 = Sant/Till eller 0,0 = Falsk/Från. Mellan värden och mellan grupper ställer man in vilken operation som önskas. Se tabell Boolska utryck.
Om manövermode är Set/Reset används den första parentesen till Set, alltså villkor för att gå Till. Den andra parentesen används för Reset, villkor för att gå Från. Status ändras bara vid positiv flank på respektive villkor. Detta gör det möjligt att ha samma villkor för Till och Från, då villkoret måste bli Från innan nästa växling kan ske.
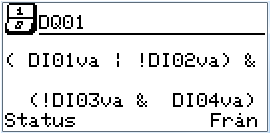
Exempel 1:
I DQ skall man använda fyra stycken DI för att ändra nivån på DQ Status. Alla fyra ingångar är för närvarande = Från. Boolsk programmering har gjorts enligt nedan:
Uträkning: Först räknas resultatet i första parentesen ut: => (0 +!0) => >(0 + 1)=1 Sedan räknas resultatet i parentes två ut: => (!0 * 0) => (1* >0)=0
Uträkningen blir: 1 * 0 = 0 Status på DQ blir Från.
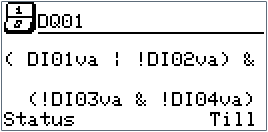
Exempel 2: Nedan har vi ändrat till (! DI04va), D.v.s. Inte DI04va. Detta gör att statusen på DQ blir Till.
Uträkning: Först räknas resultatet i första parentesen ut: => (0 +!0) => >(0 + 1)=1 Sedan räknas resultatet i parentes två ut: => (!0 * !0) => >(1* 1)=1
Uträkningen blir: 1 * 1 = 1 Status på DQ blir Till.
Boolska uttryck
AZ Trepunkt ut
Ett analogt värde, normalt en utsignal från en regulator, kan översättas till öka-/minska-signaler, för att t ex styra ett sådant ställdon. Tänkt att väljas in från digitala utgångar.
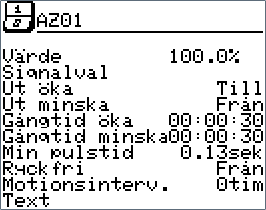
AZ01
Trepunkt ut ett
Värde Aktuellt utvärde. Beräknad position på ställdonet.
Signalval
Vald insignal för funktionen
Ut öka Öka signal Till/Från
Ut minska Minska signal Till/Från
Gångtid öka
Ställdonets körtid från helt stängt till helt öppet.
Gångtid minska
Ställdonets körtid från helt öppet till helt stängt.
Min pulstid
Kortaste tillåtna puls. Minsta tid en utgång kan vara på åt gången.
Ryckfri
*Då invärdet når ett ändläge, 0 eller 100 %, aktiveras utgången åt det hållet hela tiden. Lämpligt vid ekvensreglering.
*Då invärdet närmar sig ett ändläge, justeras regulatorn så att värde beräknat utifrån utgångarnas aktiva tid i de olika behålla sitt reglerutrymme. Därför kan positionen för AZ i detta läge skilja sig från regulatorns utsignal.
Motionsinterv.
Om 0h ingen motionering. Annars minsta antal timmar som ställdonet skall ha ansetts helt stängt innan motionering görs. Motionering innebär att ställdonet kl. 11:02 öppnas helt, och sedan stängs igen.
Text
Ramtext, visas högst upp på menysidan, på raden efter AZ01.
SK Stegkopplare
SK är en Analog/Digital-omvandlare som kan användas t ex som utgång till RC. SK omvandlar en analog signal till ett antal digitala signaler. SK kan ha upp till tio steg som kan styras ut i linjär sekvens eller i ett binärmönster. Vid linjär sekvens aktiveras utgångarna i sekvens och omslagspunkterna fördelas över den tillgängliga insignalen.
Vid binär reglering aktiveras utgångarna enligt ett binärt mönster. Första steget antas vara det med minst effekt. Varje följande steg bör ha större effekt än vad alla de tidigare har tillsammans.
Vid linjär reglering är det också möjligt att rotera utgångarna så att inte alltid samma utgång slås på först. Detta används t ex för att undvika ojämn drifttidsfördelning mellan pumpar.
Om utgångarna från SK skall användas som ingångar för andra funktionsblock är det de enskilda utgångsstegen som skall anropas. Utgångsstegen kallas s1, s2,... s9. Beteckningen för en SK-utgång ser därför ut så här: SK01s2 (utgång2 på SK01)
SK har också ett analogt utvärde, som visar var SK ligger i intervallet mellan två steg. Detta värde kallas v1,
t ex SK01v1
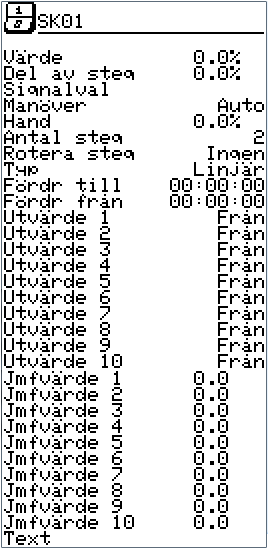
SK01
Stegkopplare 01
Värde
Aktuellt utvärde
Del av steg
Visar % av signal för aktuellt steg.
Signalval
Ingångsvärde. Referens till t ex en RC, eller ett fast värde.
Manöver
Hand/Auto.
Hand
Värde som gäller vid handställt.
Antal steg
Antal använda utgångssteg.
Rotera steg
- Ingen: Roterar aldrig steg.
- Dygn: Roterar steg varje dygn Kl. 11:00
- Vecka: Roterar steg varje måndag Kl. 11:00
- Månad: Roterar steg den första måndagen i månaden Kl. 11:00.
- StartMin: Det lägsta värdet väljs vid start och det högsta vid stopp.
- StartMax: Det högsta värdet väljs vid start och det lägsta vid stopp.
Typ
Linjär eller Binär funktion.
Fördr till
Tillslagsfördröjning för varje steg.
Fördr från Frånslagsfördröjning för varje steg.
Utvärde 1-10
Visar vilka steg i SK som är Till respektive Från.
Jmfvärde 1-10
Ett jämförelsevärde kopplat till respektive utgångssteg. Används om Rotera
första är satt till StartMin eller StartMax.
Text
Ramtext, visas högst upp på menysidan, på raden efter SK01.
PU Pumputgång
PU är tänkt för att styra en cirkulationspump till ett värme- eller kylsystem. När Gräns frånslag är över eller lika med Gräns tillslag, är PU pumpstyrning för ett värmesystem. Om Gräns frånslag ställs under Gräns tillslag, är PU pumpstyrning för ett kylsystem. Fördröjningar för från- och tillslag kan ställas in.
Fördröjningstiden kan räknas på två olika sätt:
-
Rak: Tiden börjar räkna då värdet passerar gränsen, och återställs till hela fördröjningen om det skulle gå tillbaka innan tiden gått ut.
-
Gradminuter: Tiden räknas fortare ju längre från gränsen insignalen är.
- Vid tillslag: Tidräknaren sätts till frånslagsfördröjningen, och stannar där tills insignalen passerar gränsen för frånslag. Då börjar den räkna ner, fortare om insignalen är mer än en grad förbi gränsen.
- Vid frånslag: Tidräknaren sätts till 1 timme. Tidräknaren ökar sedan så länge insignalen inte passerar gränsen för tillslag, fortare om långt ifrån. Tidräknaren blir aldrig större än inställd fördröjning för tillslag. Detta gäller även om den skulle vara mindre än 1 timme. Då insignal passerar gränsen börjar tiden räknas ner, på samma sätt som efter tillslag. Detta betyder t ex att man kan få en mycket längre tillslagsfördröjning på ett värmesystem efter en varm sommardag, än efter att utegivaren blivit mer kortvarigt uppvärmd på vår eller höst. PU skapar en enkel bild av hur värme lagras i en byggnad.
Digitala signaler kan användas till att förhindra eller tvinga tillslag. Vid uppstart, eller efter ett givarfel, fattas ett snabbare beslut om status, där inställda fördröjningar inte påverkar.
Gradminuter
När gradminuter används finns två faktorer som kan påverka räkneverket för tillslag av PU, Gradminuter och Förd. Till. Gradminuter startar alltid på 60 °minuter. Dessa °minuter är inte konfigurerbara. Räkneverket kan aldrig bli mer än vad Förd. Till är ställd till, fabriksinställningen 120 minuter.
Förklaring Gradminuter. Hur snabbt räkneverket räknar ner °minuterna beror på hur många grader som temperaturen ligger under Gräns tillslag. Vilket innebär att räkneverket kan räkna ner med mer än 1 °minut/minut.
Förutsättningar: PU har varit frånslagen i 60 minuter och har precis passerat Gräns tillslag. I 30 av dessa minuter var temperaturen 2 °C över Gräns frånslag och i 30 minuter var temperaturen 1 °C över Gräns frånslag.
Detta ger oss 150 °minuter. (60 + 230 + 130 =150 °minuter).
Dessa 150 °minuter skall nu förbrukas innan PU går till igen.
-
Ligger temperaturen 1 grad under Gräns tillslag går PU till efter 150/1 = 150 °minuter. Nerräkning 1 °minut/minut.
-
Ligger temperaturen 2 grader under Gräns tillslag går PU till efter 150/2 = 75 °minuter. Nerräkning 2 °minuter/minut.
-
Ligger temperaturen 3 grader under Gräns tillslag går PU till efter 150/3 = 50 °minuter. Nerräkning 3 °minuter/minut.
Förklaring Förd. Till.
Detta är ett tidräkneverk som talar om hur lång tid det får ta som mest innan PU går
till efter att temperaturen passerat Gräns tillslag. Det innebär att Gradminuterna
aldrig kan ackumulera mer °minuter än vad Förd. Till är satt till. Är Förd. Till ställd
till 120 minuter kan det inte ackumuleras fler än 120 °minuter.
Gradminuter och förd. Till
Parametern Tid kvar visar den tid som mest återstår innan PU startar. Att tänka på är
att vid Gradminuter räknar räkneverket ner det antalet grader som temperatur ligger
under Gräns till per minut. Detta innebär att ligger temperaturen 2 °C under Gräns
till, räknar räkneverket ner med 2 °minuter/minut.
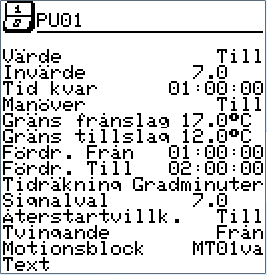
PU01
Pumputgång ett
Värde Aktuell status på utgång, Till/Från.
Invärde Invärde från Signalval.
Tid kvar
Återstående tid till omslag
Manöver
PU kan ställas i Auto, Till eller Från. Även om PU är handställd, fortsätter tidräkningen enligt inställda gränser. För att motionskörning av PU skall gälla, måste Manövermode Auto vara vald.
Gräns frånslag
PU går Från då gräns passeras. Tid till frånslag räknas beroende på om insignalen ligger över eller under denna gräns.
Gräns tillslag
PU går till då gräns passeras. Om gräns tillslag är högre än gräns frånslag, betraktas det som ett kylsystem, och är Till för högre insignal.
Fördr. Från
Tidsfördröjning frånslag.
Fördr. Till
Tidsfördröjning tillslag.
Tidräkning
Man kan välja mellan Rak tidräkning eller Gradminuter. Se förklaring förgående sidan.
Signalval Vald insignal (AV) eller fast temperatur.
Återstartvillk.
En digital signal kan väljas in. Om den är Från, blir PU Från, oavsett inställda gränser och fördröjningar.
Tvingande
En digital signal kan väljas in. Om den är Till går PU Till, oavsett inställda gränser och fördröjningar.
Motionsblock
För att undvika igensättning av pumpar etc. motionskörs pumpen enligt inställningar i det invalda motionsblocket. Fabriksinställning är MT01 som i sin tur har fabriksinställning varje dag, 11:00 – 11:02. Motionsblocket hanteras som en digital signal, och utvärdet från PU blir motionsblocket ELLER andra villkor. Manöver måste vara Auto.
Text
Ramtext, visas högst upp på menysidan, på raden efter PU01.
TM Termostatfunktion
En digital signal vars värde beror på om en vald analog insignal är över eller under sin gräns. Om gränsen för tillslag är lägre än för frånslag, blir TM Till vid låga invärden, och tvärt om. Gränser och fördröjningar kan vara fasta eller rörliga.
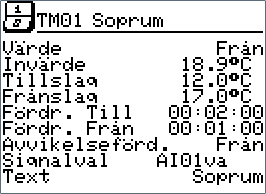
TM01
Termostatfunktion ett
Värde
Aktuell status på utsignal, Till/Från.
Invärde
Värde på vald Insignal.
Tillslag
Invärde för tillslag
Frånslag
Invärde för frånslag
Fördr. Till
Status blir Till då invärdet varit Under Börvärde längre tid än Fördr. Till.
Fördr. Från
Status blir Från då invärde varit över Återgång längre tid än Förd. Från.
Avvikelseförd
Om avvikelsefördröjning är aktiverat, blir fördröjningarna kortare vid större avvikelse. I stället för att bara räkna tid då ett omslag väntar, räknas tid gånger avvikelse i hela grader. Vid t ex 2 grader förbi gränsen blir alltså omslagsfördröjningen halva den inställda. Fördröjningen blir aldrig längre än den inställda.
Signalval Insignal väljs i en lista av i systemet tillgängliga analoga signaler.
Text Ramtext, visas högst upp på menysidan, på raden efter TM01.
I visat exempel är enheten °C. Givetvis fungerar TM även för flöden, tryck, osv.
Funktioner
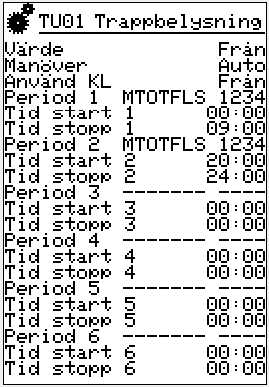
TU Tidur
KTC-enheten har veckotidur TU som kan programmeras för tillslag och frånslag vid valda tider och veckodagar. Varje tidur kan lagra 6 driftperioder. Det är också möjligt att programmera driftperioder för 4 olika helgdagar. Helgdagarnas placering under året görs i årskalendern KL.
TU01
Tidur ett.
Värde
Aktuell status på utsignal, Till/Från.
Manöver
TU kan handställas, Till eller Från, eller lämnas i Auto. Om inställningen inte är Auto, blir signalen TUnnvf Till. Använd KL Om Till, hämtar TU specialdagar 1-4 från KL (om det är specialdag en viss dag är det INTE Må – Sö). Om Från är det alltid Må – Sö. Period 1-6 Aktiva dagar för varje tidsperiod. En eller flera av veckans dagar, samt av fyra special/helgdagar enligt KL. Vald dag visas som dagens första bokstav eller siffran 1-4. Se beskrivning under Årskalender KL.
Tid start 1-6
Klockslag för tillslag, timmar och minuter.
Tid stopp 1-6
Klockslag för frånslag, timmar och minuter.
Text
Ramtext, visas högst upp på menysidan, på raden efter TU01
VX Växlingsfunktion
För att t ex kunna se till att ett antal pumpar får liknande gångtid, finns växlingsfunktion. Varje sådan funktion har upp till 4 utsignaler, nåbara med suffix v1, v2 osv, som på bestämda klockslag, med inställbara intervall, cykliskt är sanna en i taget.
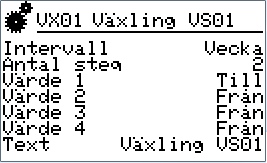
VX01
Växlingsfunktion ett.
Intervall:
- Timme: Växling varje jämn timme.
- Dygn: Växling varje dag kl. 11:00
- Vecka: Växling varje måndag kl. 11:00.
- Månad: Växling första måndagen i varje månad kl. 11:00.
Antal steg Antal använda utgångssignaler. För att få en signal som är sann halva tiden, sätt till 2, för att få en som är sann 1/3 av tiden, eller växla mellan tre, sätt till tre, etc.
Värde 1-4 Indikerar statusen för de valda stegen i växlingsfunktionen.
Text
Ramtext, visas högst upp på menysidan, på raden efter VX01.
TO Tidsobjekt
En tidräknare med startvillkor, som kan återställas på inställbart villkor. Det går alltså att både stoppa och nollställa räknaren, med varsitt inställbart villkor. Användbar t ex för rampfunktioner eller drifttidslarm.
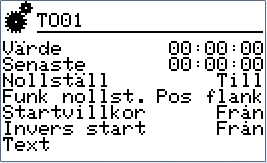
TO01
Tidsobjekt ett.
Värde
Räknarens värde sedan senaste nollställning.
Senaste
Värde vid senaste nollställning.
Nollställ Signal som skall styra nollställningsvillkoret.
Funk nollst.
Funktion för nollställande av värde:
- Positiv flank, Negativ flank, Valfri flank, Till eller Från.
Startvillkor
Signal som startar/stoppar räknaren.
Invers start
Om Till: Startvillkor gäller omvänt.
Text
Ramtext, visas högst upp på menysidan, på raden efter TO01.
HR Händelseräknare
En räknare med startvillkor, som kan återställas på inställbart villkor. Det går alltså att både stoppa och nollställa räknaren, med varsitt inställbart villkor. Det som räknas är förändringar i en digital signal. Användbar t ex för att räkna antal starter senaste dygnet för en pump. Om insignalen inte är en digital signal räknas istället förändring sedan senaste återställning. Detta kan användas för att t ex se en förbrukning under ett visst tidsintervall.
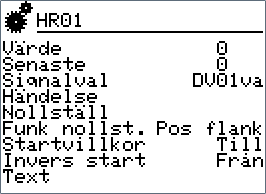
HR1
Händelseräknare ett.
Värde
Räknarens värde sedan senaste nollställning.
Senaste
Värde vid senaste nollställning.
Signalval
Den signal vars förändringar skall räknas.
Händelse
Funktion för räkning: Positiv flank, Negativ flank och Valfri flank.
Nollställ
Signal som skall styra nollställningsvillkoret.
Funk nollst.
Funktion för nollställande: Positiv flank, Negativ flank, Valfri flank och Till eller Från.
Startvillkor
Signal som kan Starta/stoppa räknaren.
Invers start
Om Till: Startvillkor gäller omvänt.
Text
Ramtext, visas högst upp på menysidan, på raden efter HR01.
MT Motionsblock
För att t ex motionsköra pumpar finns digitala signaler tillgängliga som är aktiva vid bestämda tider.
Det finns fyra motionsblock, fabriksinställningar för dessa är:
- MT01va: Till kl. 11:00 - 11:02 varje dag.
- MT02va: Till kl. 11:00 - 11:02 varje måndag.
- MT03va: Till kl. 11:00 - 11:02 första måndagen i varje månad.
- MT04va: Till kl. 11:00 - 11:02 varannan dag.
MT01
Motionsblock ett.
Värde
Aktuell status för valt motionsblock
Interv (dygn)
Dagar mellan motionskörningar. För vissa intervall synkroniseras detta med kalender:
- 2 dygn: Måndag, onsdag och fredag
- 3 dygn: Måndag och torsdag
- 7 dygn: Måndag.
- 30 dygn: Den första måndagen i varje månad.
Annars aktiveras MT första gången klockslaget stämmer, och sedan med det inställda intervallet rullande.
Vid kl.
Klockslag för start av motionskörning.
Varaktighet
Hur länge motioneringen skall pågå varje gång.
Text
Ramtext, visas högst upp på menysidan, på raden efter MT01.
TB Trendbuffrar
Utöver de värden som loggas automatiskt i KTC-enheten kan användaren själv definiera värden som skall loggas.
TB01
Trendbuffer ett.
Värde
Aktuellt värde/mätarställning/Digitalsignal på vald loggningssignal.
Signalval
Vald signal att logga.
Intervall
Loggningsintervall: 1, 2, 3, 4, 5, 6, 10, 15, 20, 30, 60 minuter.
Typ
- Medelvärde: Medelvärde loggas varje intervall.
- Mätarst: Värdet loggas varje intervall (värdet just då).
- Digital: Värdet loggas vid varje förändring. Högst en puls under den inställda tidsperioden loggas
Text
Ramtext, visas högst upp på menysidan, på raden efter TB01.
KL Årskalender
Systemet kan hålla reda på speciella dagar under året, då den vanliga veckorytmen bryts. Detta ger möjlighet att programmera de fyra olika specialdagarna H1-H4 i TU. Om en specialdag är aktiv har veckodagen ingen betydelse.
Kalendern är egentligen två kalendrar.
Den ena kalendern har svenska helgdagar. Röda dagar går som H4, aftnar som H3. Denna kalender kan man välja om den skall gälla eller inte.
Den andra kalendern är användarkonfigurerbar. Konfigureringen görs via överordnat system, den kan inte göras via det lokala användargränssnittet, display - tangentsats.
Aktuell status för båda kalendrarna visas på kalendersidan. Om ingen specialdag är aktiv, visas aktuell veckodag. Skulle de olika kalendrarna samtidigt ge olika specialdagar, kommer den användarkonfigurerade att gälla.
Dagar som ligger i den svenska kalendern:
H4 (röda dagar): Nyårsdagen (1/1), Trettondagen (6/1), Långfredagen, Påskdagen, Annandag påsk, Första maj (1/5), Kristi himmelsfärdsdag, Nationaldagen (6/6), Midsommardagen, Juldagen (25/12), Annandag jul (26/12)
H3 (aftnar): Påskafton, Midsommarafton, Julafton (24/12), Nyårsafton (31/12)
Specialdag
Status för användarinställda helgdagskalendern.
Allm. helgdag
Status för den inbyggda kalendern.
Använd allm.
- Svenska helgdagar gäller. Fabriksinställd.
- Inga: Inga förprogrammerade helgdagar används.
Text
Ramtext, visas högst upp på menysidan, på raden efter KL.
In- och utgångar
DI Digitala in
För varje digital ingång kan man se aktuell status och tillslagsfrekvens. Även antal tillslag visas, detta värde kan redigeras vid behov. För att utöka tillgången av digitala ingångar på SRD5000 finns expansionsenheten EXD01 med åtta extra digitala ingångar. Fyra stycken EXD01 kan anslutas mot varje SRD5000. EXD01-1 får beteckning DI11-DI18 och EXD01-2 får beteckningarna DI21-DI28, osv. För att komma till inställningar DI måste man markera Basenhet alternativt EXD01-1 eller EXD01-2 som nedan är anslutna expansionsenheter. Markera enhet, sedan OK.
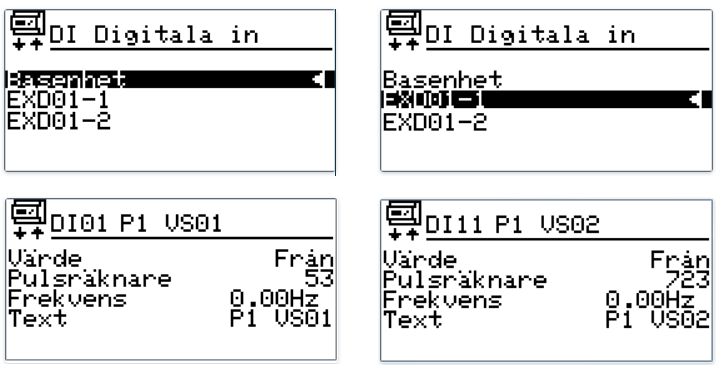
DI01/DI11
Digital ingång 01/11.
Värde
Status på ingången. Till/Från.
Pulsräknare
Antal till- och frånslag. Kan ställas.
Frekvens
Frekvens på till-/frånslag.
Text
Ramtext, visas högst upp på menysidan, på raden efter DI01.
AI Analoga in
Till de analoga ingångarna ansluts passiva temperaturgivare typ PT1000 eller Ni1000. Ingången kan också konfigureras till att läsa av en digital slutning.
För att utöka tillgången av analoga ingångar på SRD5000 finns expansionsenheten EXA01 med fyra extra analoga ingångar. Fyra stycken EXA01 kan anslutas mot varje SRD5000. EXA01-1 får beteckning AI11-AI14 och EXA01-2 får beteckningarna AI21-AI24. För att komma till inställningar AI måste man markera Basenhet alternativt EXA01-1 eller EXA01-2, osv, som nedan är anslutna expansionsenheter. Markera enhet, sedan OK.
EXA01 har även fyra extra universella ingångar, UI, som bl.a. kan användas för passiva temperaturgivare. Se förklaring UI.
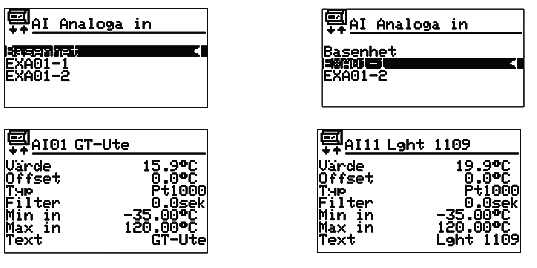
AI01/AI11
Analog ingång ett/elva.
Värde
Aktuellt temperatur. (För digital in 1 eller 0)
Offset
Om aktuell temperatur visar för högt/lågt värde kan man med offset funktionen kalibrera temperaturen så rätt värde visas.
Typ
Typ av givare, Pt1000 alternativt Ni1000. Ingången kan även användas som digital in.
Filter
Enheten avläser ingångarna med mycket hög noggrannhet. Normalt innehåller insignalen ett visst brus, genererat av externa störkällor. För att minimera inverkan av sådana störningar kan insignalen filtreras. Filterfaktorn bör provas ut individuellt för varje applikation så optimal funktion erhålls. Filtreringen görs med hjälp av en tidskonstant.
Min in
Undre temperaturgräns som ansluten givare klarar mäta.
Max in
Övre temperaturgräns som ansluten givare klarar mäta.
Text
Ramtext, visas högst upp på menysidan, på raden efter AI01.
Exempel Filtertid: En utegivare utsättas normalt inte att för några snabba temperatur-förändringar och kan därför tilldelas en lång filtertid. Reglerande givare på en tappvarmvatten-reglering utsätts för snabba temperaturväxlingar men skall ändå leverera rätt >vattentemperatur, och bör då tilldelas en kort/ingen filtertid.
UI Universella ingångar
De universella ingångarna är flexibla ingångar som kan anslutas mot passiva temperaturgivare (typ PT1000 eller NI1000, samt NTC-givare typ TA-EGA), aktiva givare 0-10 V och de kan även fungera som en digital ingång.
För att utöka tillgången av universella ingångar på SRD5000 finns expansionsenheten EXA01 med fyra extra universella ingångar. Fyra stycken EXA01 kan anslutas mot varje SRD5000. EXA01-1 får beteckning UI11-UI14 och EXA01-2 får beteckningarna UI21-UI24. För att komma till inställningar UI måste man markera Basenhet alternativt EXA01-1 eller EXA01-2 som nedan är anslutna expansionsenheter. Markera enhet, sedan OK.
EXA01 har även fyra extra analoga ingångar, AI, som kan användas för passiva temperaturgivare. Se förklaring AI.
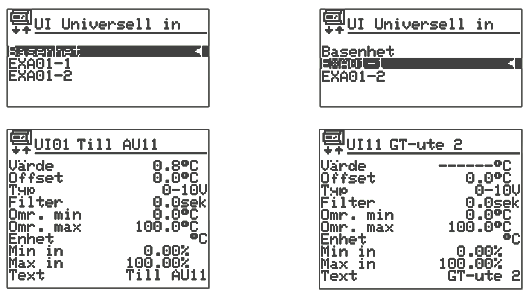
UI01/UI11
Universell ingång ett/elva.
Värde
Aktuellt värde
Offset
Kalibrering av aktuellt värde. Om aktuellt värde visar för högt/lågt kan man med offset funktionen kalibrera så rätt värde visas.
Typ
Val av signal: Pt1000, Ni1000, 0-10 V, Digital in, TA-EGA (NTC).
Filter
Enheten avläser ingångarna med mycket hög noggrannhet. Normalt innehåller insignalen ett visst brus, genererat av externa störkällor. För att minimera inverkan av sådana störningar kan insignalen filtreras. Filterfaktorn bör provas ut individuellt för varje applikation så optimal funktion erhålls. Filtreringen görs med hjälp av en tidskonstant.
Se Exempel förgående sida.
Omr. Min
Vad 0 % av signalen motsvarar.
Omr. Max
Vad 100 % av signalen motsvarar.
Enhet
Enhet på omräknat värde.
Min in
Minsta tillåtna insignal, lägre värde på insignal ger givarfel. För passiva givare (Pt1000, Ni1000) i °C, för aktiva i Volt. För 0-10V ger insignal på denna nivå utvärde motsvarande Omr. Min.
Max in
Högsta tillåtna insignal, högre värde på insignal ger givarfel. För passiva givare (Pt1000, Ni1000) i °C, för aktiva i Volt. För 0-10V ger insignal på denna nivå utvärde motsvarande Omr. Max.
Text
Ramtext, visas högst upp på menysidan, på raden efter UI01.
DU Digitala ut
De digitala utgångarna är avsedda för 24 VAC, max 0,5A.
För att utöka tillgången av digitala utgångar på SRD5000 finns expansionsenheten EXD01 med fyra extra digitala utgångar, dessa utgångar är avsedda för 230 VAC, max 10A. Fyra stycken EXD01 kan anslutas mot varje SRD5000. EXD01-1 får beteckning DU11-DU14 och EXD01-2 får beteckningarna DU21-DU24, osv. För att styra högre spänningar och/eller strömmar från SRD5000’s digitala utgångar, finns reläenheten RE4i vars utgångar är avsedda för 230 VAC, 10A. För att komma till inställningar DU måste man markera Basenhet alternativt EXD01-1 eller EXD01-2 som nedan är anslutna expansionsenheter. Markera enhet, sedan OK.
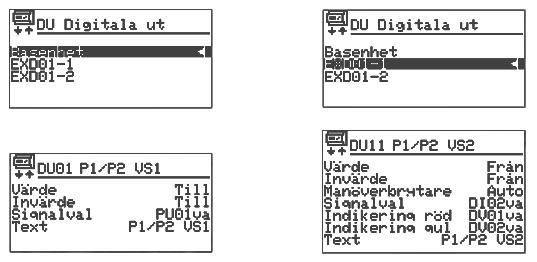
Parametrar för SRD5000
DU01
Digital utgång ett.
Värde
Aktuell status på utgången. Till/Från.
Invärde
Status på Insignal.
Signalval
Vald signal för Invärde.
Text
Ramtext, visas högst upp på menysidan, på raden efter DU01.
Parametrar för EXD01
DU011
Digital utgång elva.
Värde
Aktuell status på utgången. Till/Från.
Invärde
Status på Insignal.
Manöverbrytare
Läge på manöveromkopplare på kapsling.
Signalval
Vald signal för Invärde.
Indikering röd
Signal som skall tända röd ind. på EXD01’s kapsling.
Indikering gul
Signal som skall tända gul ind. På EXD01’s kapsling.
Text
Ramtext, visas högst upp på menysidan, på raden efter DU01.
AU Analoga ut
De analoga utgångarna är avsedda för styrning av 0-10V utrustning.
För att utöka tillgången av analoga utgångar på SRD5000 finns expansionsenheten EXA01 med fyra extra analoga utgångar. Fyra stycken EXA01 kan anslutas mot varje SRD5000. EXA01-1 får beteckning AU11-AU14 och EXA01-2 får beteckningarna AU21-AU24, osv. För att komma till inställningar AU måste man markera Basenhet alternativt EXA01-1 eller EXA01-2 som nedan är anslutna expansionsenheter. Markera enhet, sedan OK.
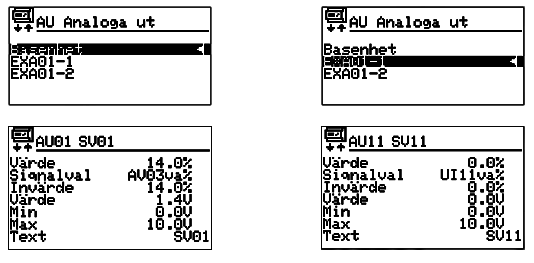
AU01
Analog utgång ett.
Värde
Aktuell procentuell signal på utgången
Signalval
Val av invärde för signalen. Kan väljas bland alla analoga värden i systemet.
Invärde
Aktuellt värde på insignalen.
Värde
Spänning på utsignal.
Min
Utvärde som motsvarar 0 % insignal.
Max
Utvärde som motsvarar 100 % insignal.
Text
Ramtext, visas högst upp på menysidan, på raden efter AU01.
MB M-Bus
Via M-Bus samlas mätdata in från anslutna mätnoder. Dessa mätnoder kan vara allt från en enkel temperaturgivare till mer avancerad insamling av olika typer av förbrukningar, såsom vattenmätare, elmätare och energimätare för fjärrvärme.
Då MB används för att läsa in mätarställningar finns en funktion för att minska antalet felläsningar. Ett enstaka värde mindre än det tidigare, eller mycket större (+20% eller 1000) accepteras inte.
Meny MB M-Bus data
Vilka data som presenteras beror på vilken typ av mätarnod som är ansluten. I exemplet nedan har vi anslutit en El-mätare via M-Bus till KTC-enheten.
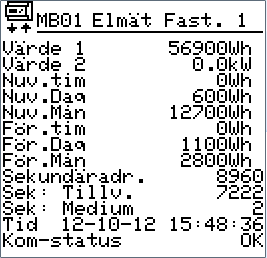
MB01
M-Busobjekt nummer ett.
Elmät. Fast. 1
Ramtext. Namn på mätare ansluten till MB01 Skrivs vid parameter Text, meny MB-objekt.
Värde 1-6
Här visas mätarställning och övrig information som levereras av M-Bus-objektet. Upp till sex olika värden från M-Bus objekt kan visas. Endast huvudvärden visas. Skall fler VIF visas, aktiveras dessa under MB-objekt.
Nuv. tim
Förbrukning pågående timmen.
Ex: om kl. är 13.25, => förbruk. 13.00–13.25
Nuv. Dag
Förbrukning pågående dygn.
Ex: om kl. 13.25 22/8 => förbruk. 22/8, 00.00–13.25
Nuv. Mån
Förbrukning pågående månad.
Ex: om 22 augusti => förbruk. 1/8–22/8
För. tim
Förbrukning förgående hela timmen.
Ex: om kl. är 13.25 => förbruk 12.00–13.00
För. Dag
Förbrukning förgående hela dygn.
Ex: om kl. 13.25 22/8 => förbruk. 21/8, 00.00–24.00
För. Mån
Förbrukning förgående månad.
Ex: om 22 augusti, => förbruk. Juli, 1/7–31/7
Sekundäradr.
Enhetens sekundäradress.
Sek: Tillv.
Talar om vem som tillverkat ansluten M-Busnod.
Sek: Medium
Tal som översätts till vilket medium som mäts, översätts av mjukvara.
Tid
Datum och tid för senaste avläsning.
Kom-status
Visar om mätaren är korrekt ansluten och fungerar. OK/Time Out/Kollision.
Meny M-Bus
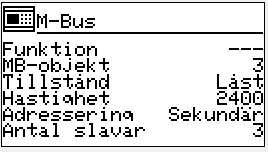
I meny M-Bus finns bl a möjlighet att söka efter anslutna M-Busnoder både via primär- och sekundäradress.
Funktion.
- ---: Normalläge
- Leta: Söker upp alla anslutna MBus-mätare
- Avbryt: Avbryter pågående sökning, eller låsning. Återgå till tillstånd Normal
- Rensa alla: Tar bort alla M-Bus anslutna mätare
- Spara RX: Sparar senaste inkomna data i en fil. MBusRx.txt
- Tolka telegram: DUC läser igenom inkommen data och listar innehållet som SR-objekt. Körs lämpligen från Automate.
- Lås: Lås läsningen till en mätare för att få täta uppdateringar av denna. För driftsättning och felsökning.
MB-objekt
Inställning för att välja ut ett visst MB-objekt för en funktion. Används för "Tolka telegram" och för "Lås".
Tillstånd
- Normal: Mätare läses av enligt sina inställning, en i taget.
- Letar..: Sökning efter mätare pågår.
- Överlast: Elektroniken signalerar överlast. En mätare trasig, eller för många MBus-laster anslutna (vissa mätare drar mer än en MBus-last).
- Tolkar..: Inläsning av data för tolkning pågår.
- Låst: DUC är låst till en mätare. Endast den inställda mätaren läses, och det så ofta som möjligt (ca var tredje sekund).
Hastighet
Valbara hastigheter är 300 och 2400 baud. Fabriksinställning 2400 baud.
Adressering
Val av vilken typ av adressering som skall användas vid sökning efter anslutna M-Busobjekt. Primär/sekundär.
Antal slavar
Visar antalet hittade/anslutna M-Bus objekt.
Meny M-Busobjekt Sekundäradressering
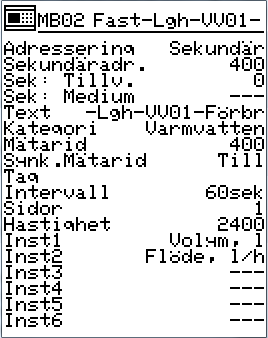
MB02
M-Busobjekt två.
Fast-Lgh-VV01-
Ramtext. Namn på mätare ansluten till MB2. Skrivs vid parameter Text.
Adressering
I exemplet används sekundäradressering
Sekundäradr.
Sekundäradress
Sek: Tillv.
Tal som anger tillverkare för ansluten nod.
Sek: Medium
Mätt medium enligt M-Busstandard.
Text
Ramtext, visas högst upp på menysidan, på raden efter MB02.
Kategori
Talar om vad som mäts, översätts från medium. Om kategorin ändras, ändras inte talet i Medium.
Mätarid
Nodens ID-nummer
Synk. Mätarid
Läser nodernas ID/Serienummer
Tag
Kan t.ex. användas för info om mätares placering.
Intervall
Hur ofta noden frågas av, i sekunder.
Sidor
Hur många sidor som behövs för att få de uppgifter som söks. För djupare information se aktuell mätares manual.
Hastighet
Baudrate, 300 eller 2400 baud.
Inst 1-6
Upp till sex olika värden kan presenteras från varje ansluten M-Busnod.
Meny M-Busobjekt: Primäradressering.
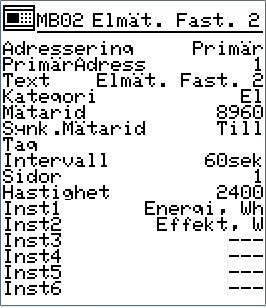
MB02
M-Busobjekt två.
Adressering
I exemplet används primäradressering
PrimärAdress
Ansluten M-Busnods primäradress
Text
Ramtext, visas högst upp på menysidan.
Elmät. Fast. 2
på raden efter MB02. Skrivs vid parameter Text.
Kategori
Talar om vad som mäts.
Mätarid
Nodens ID-nummer
Synk. Mätarid
Läser nodernas ID/Serienummer
Tag
Tag text. Kan t.ex. användas för info om mätares placering.
Intervall
Hur ofta noden frågas av, i sekunder.
Sidor
Hur många sidor som behövs för att få de uppgifter som söks. För djupare information se aktuell mätares manual.
Hastighet
Baudrate, 300 eller 2400 baud.
Inst 1-6
Upp till sex olika värden kan presenteras från varje ansluten M-Busnod.
Sökning efter M-Bus anslutna mätnoder.
Det är möjligt att söka både på Primär- och Sekundäranslutna M-Busnoder. Enheten söker själv av hela bussen och lägger in hittade noder i nummerordning för vald Adressering och hastighet. Detta görs på sidan M-Bus meny. (Vill man ha en viss M-Busnod på ett speciellt MB-objekt, följ instruktion ”Kontakta M-Busmätare via känd Primär-/Sekundäradress” på efterföljande sidor i manualen.)
För att se vilka noder som anslutits, se avsnitt M-Bus data.
- Markera först Adressering, välj om du skall söka på Primär eller Sekundär adressen.
- Markera - - - bredvid Funktion
- Tryck penna och scrolla fram till Leta med och , ok.
- Displayen visar:
- När texten Letar på raden Tillstånd ändras till Normal är sökningen klar och antalet hittade mätnoder visas längst ner till höger på displayen, Antal slavar. I vårt exempel hittades två mätnoder.
Kontakta M-Busmätare via känd Sekundäradress.
Om M-Busnodens Sekundäradress är känd kan man skriva in adressen direkt på det M-Busobjekt man vill ha noden på. När uppgifterna för sökning av noden är inskrivna kan man i meny M-Bus data, efter några minuter, se om anslutningen gått bra.
Tillvägagångssätt:
Markera M-bus och tryck OK. Tryck på menytangenten på enheten och välj MB-objekt.
- Förflytta dig till Adressering, välj Sekundär, OK.
- Flytta markören med piltangenterna och markera Sekundäradr. Tryck på redigeringstangentenen och använd piltangenterna för att skriva in den Sekundärradress som mätaren har som skall anslutas, (ex: 1981104), tryck sedan OK.
- Flytta nu markören och markera raden Hastighet. Använd redigeringstangenten och välj den hastighet som mätaren kommunicerar med i M-Busnätverket, se mätarens manual, och tryck sedan OK.
Kontakta M-Busmätare via känd Primäradress.
Om M-Busnodens Primäradress är känd kan man skriva in adressen direkt på det M-Busobjekt man vill ha noden på. När uppgifterna för sökning av noden är inskrivna kan man i meny M-Bus data, efter några minuter, se om anslutningen gått bra.
Tillvägagångssätt: 1. Markera M-bus och tryck OK. Tryck på meny tangenten på enheten och välj M-Busobjekt. 2. Förflytta dig till Adressering, välj Primär, OK. 3. Flytta markören med piltangenterna och markera Primäradress. Tryck på redigeringstangenten och använd piltangenterna för att skriva in den Primäradress som mätaren har som skall anslutas,(ex: 2), tryck sedan OK. 4. Flytta nu markören och markera raden Hastighet. Använd redigeringstangenten och välj den hastighet som mätaren kommunicerar med i M-Busnätverket och tryck sedan OK.
MS: Mätare som kräver speciella inställningar
Då en mätare kopplas in via M-Bus, läser KTC-enheten av vilket medium den arbetar med, och sätter automatiskt upp ett antal inställningar, som oftast passar mätare med detta medium. Användaren kan också välja ytterligare värden att läsa av från en lista. Sist i listan kommer ”MS01” – ”MS04” (MS16 för vissa produkter). Detta är en möjlighet att utnyttja mer av M-Busprotokollet, och läsa ut ytterligare värden från en mätare, genom att göra detaljerade inställningar.
OBS! För att göra konfigureringar i denna meny, ta hjälp av information på sidan om avancerad M-Bus: MBus lite djupare
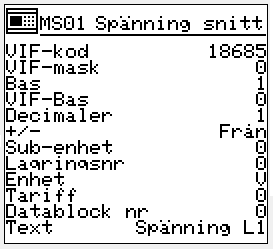
VIF-kod
Önskad VIF-kod (förutom skalning), enligt M-Bus-protokollet. Skrivs in decimalt.
- Om den inställda koden är mindre än 128 kommer MMC att bara ta hänsyn till den första byten i inkommande vif då jämförelse görs.
- Om man skulle vilja kräva exakt matchning mot en kod mindre än 128, addera 256 till önskad vif, så tolkar MMC det som just krav på exakt matchning.
VIF-mask
Ett bitmönster, upp till 7, med de bits i VIF-koden som ger skalfaktorn. Skrivs in decimalt 0, 1, 3, eller 7.
Bas
10-exponenten för skalningens startvärde, enligt MBus-protokollets definition.
VIF-Bas
Samma funktion som ”Bas”
Decimaler
Upplösning på resultatet, antal decimaler.
+/—
Funktion för denna inställning beror på vilket dataformat mätaren använder. Systemet utgår
i de allra flesta fall från att det kan finnas negativa värden, och tolkar värdet efter det.
Undantaget är om data är kodad som binärt heltal. då styr denna inställning hur data
ska tolkas. Om Från tolkas i det fallet alla värden som positiva.
(För de i systemet förinställda koderna antas alltid data med tecken.)
Sub-enhet
Unit eller subunit enligt M-Busdokumentationen. Plockas ur DIF.
Lagringsnr
Sökt lagringsnummer. Inställning -1 ger första funna värde oavsett lagringsnummer.
Enhet
Enhet för det lästa värdet.
Tariff
Sökt tariff enligt MBus-protokollet. Om Tariff sätts -1
fås första funna värde oavsett tariff
Datablock nr
Om denna är > 0 ignoreras VIF-kod, VIF-mask, VIF-bas, Sub-enhet, Lagringsnummer och Tariff. DUC tar i stället
det datablock som kommer på denna plats i ordningen, räknat över samtliga telegram. Inställningar för tecken,
decimaler, enhet och bas (skalning) är fortfarande giltiga. Numret är det samma som index för SR-objektet med det
önskade värdet.
Text
En text som beskriver objektet. Visas längst upp på sidan.
SR: Tolkningsresultat MBus (Scan Result)
Dessa objekt kan bara ses via konfigurationsberktyg, som Automate.
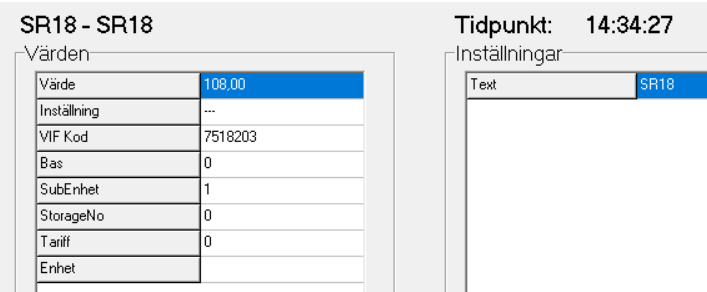
Objektet är normalt tomt, men efter att i MM ha utfört kommandot Tolka telegram fylls ett antal objekt på, beroende på vilken data som hittats för vald mätare. För närmare instruktion om hur detta går till, se sidan som handlar just om MBus. Värden ligger kvar en timma efter tolkning.
Inga inställningar kan göras.
Visade värden:
Värde
Funnet värde. Kan vara felskalat då skalningen inte alltid är känd.
Inställning
Om den funna VIF-Koden är en av de inbyggda ges namnet här. Annars '---'
VIF Kod
MBus-kod som kan användas som urvalskriterium. För att använda vid inställning av MS.
Bas Om VIF-Kod är en av de kända inställningarna visas här den funna skalningen. För att använda vid inställning av MS.
SubEnhet
Läst SubEnhet. Ett urvalskriterium. För att använda vid inställning av MS.
StorageNo Läst StorageNo. För att använda vid inställning av MS.
Tariff
Läst Tariff. För att använda vid inställning av MS.
Enhet
Fylls i av DUC om VIF-koden hör till de inbyggda.
MV Modbus värde
Via Modbus kan man läsa och skriva data och kommandon i anslutna enheter. Modbus-protokollet är mycket flexibelt, vilket kräver en mängd inställningar för att anpassa sig till olika fabrikat och produkter.
Meny MV Modbus värde Ett MV-objekt innebär en möjlighet att läsa och skriva ett värde via Modbus. Ett antal inställningar gör det möjligt att hantera många olika typer av värden, med olika skalning och upplösning. Värdet görs tillgängligt med rätt skala och enhet för övriga systemet och, via SRDLink, för andra KTC-enheter. Valfritt värde i systemet kan kopplas till MV, för att skrivas via Modbus så snart det ändras mer än inställd upplösning.
En synlig, skrivbar, tidräknare underlättar service.
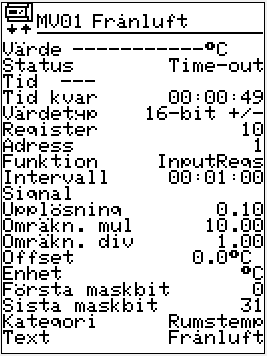
Värde
Senaste värde läst ifrån eller skrivet till ansluten enhet.
Status Aktuell status för värdet: Av, OK, eller eventuell feltext.
Förklaring av statustexter
- Time-out: Inget svar på IP eller RS485 (för kort time-out i MR eller MG)
- Funktionsfel: Funktion stöds inte av slav, eller fel i inställning av modbustyp (konfigureringsfel)
- Adressfel: Adress finns inte i slav, eller Register utanför tillåtet område (< 0 eller > 65535) (konfigureringsfel)
- Värdefel: Slav accepterar inte skrivet värde (konfigureringsfel i DUC)
- Slavfel: Allmän felstatus från slav, eller fel i svar i asciiformat (om varje gång felsök slav, om ibland, felsök RS485)
- Långsam: Slav har uppfattat begäran, men det tar tid att processa (osannolikt i vår applikation)
- Upptagen: Slaven säger att den inte kan ta emot kommandon just nu (för korta intervall kanske?)
- NAK: Felkod 7 från slav
- Paritet: Felkod 8 från slav
- Okänt: Felkod 9 från slav
- Okänd IP: Felmeddelande från gateway. Troligen felkonfigurerad. (problem i Modbus-gateway:en)
- GW Dev TO: Gateway meddelar time-out på RS485 (problem i Modbus-gateway:en eller slav)
- Annat fel: Adress > 247, eller för många register på en läsning (felkonfigurering)
- TCP-koppling: Time-out i försök att skapa TCP-koppling (IP-problem)
- TCP sändfel: DUC kunde inte skapa en TCP-session (internt problem i DUC, mjukvara)
- TCP sänt del: Lyckades sända del av meddelande, men inte resten (IP- eller slavproblem)
- TCP-fel: Felmeddelande från TCP-protokoll, eller problem med IP i DUC (IP-problem eller bug)
- DNS-fel: IP-adress som är domännamn kunde inte kodas av rätt
- TCP annat: Portinställning ändrad under pågående kommunikation, eller internt fel i MG
- TCP minne: Meddelande ut för långt för intern lagring (tillfälligt fel eller mjukvaruproblem)
- TCP skrivfel: Kunde inte sända meddelande (mjukvara, möjligen överlast av systemet)
- TCP stängd: Slaven eller gateway stängde av sessionen innan svar kommit (felsök slav eller gateway)
Tid
Tid för senaste läsning från enhet.
Tid kvar
Tidräknare till nästa läsning av data. Kan också skrivas, t ex för att snabba på läsning vid service.
Värdetyp
Välj om MV ska hantera enstaka bit, 16-bittars, 32-bittars, 64 bittars värde, eller flyttal (real). Man kan också välja om värdet ska kunna vara negativt, och för 32-bittars värden kan man ställa in om mest signifikanta ordet kommer på lägre eller högre (omvänd) referensnummer.
Register
Registernummer för värdet enligt slavens specifikation
Adress
Modbus-adress till enheten på Modbusslingan.
Funktion
Vilken Modbus funktionskod som ska användas för att läsa värdet
Intervall
Hur ofta värdet ska läsas
Signal
Värde i systemet som, efter omräkning, ska skrivas till Modbusenheten. Om inget anges sker bara skrivning då huvudvärdet ändras.
Upplösning
Noggrannhet vid skrivning. Skrivning görs först då vald
signal ändras mer än vad upplösningen anger.
Omräkn. mul
För skalning. Det inkommande värdet multipliceras med denna faktor.
Omräkn. div
För skalning. Det inkommande värdet divideras med detta tal.
Offset
För skalning. Detta värde adderas till det inkomande värdet efter att det skalats om.
Enhet
Enhet för huvudvärde och offset.
Första maskbit
Om delar av ett 16- eller 32-bittars värde ska användas, anges här första giltiga bit. Numreras från 0, minst signifikanta bit är 0.
Sista maskbit
Om delar av ett 16- eller 32-bittars värde ska användas, anges här sista giltiga bit. Numreras från 0, mest signifikanta bit är 15 för 16-bittarsvärden, 31 för 32-bittarsvärden.
Kategori
Ett sätt att gruppera data.
Skrivning av modbusvärden Då ett värde ska skrivas till en modbus-slav, väljer systemet en funktionskod beroende på inställningen av funktion för läsning, och inställd värdetyp. Funktion 1 och 2 ger skrivning med funktion 5 (”Write Single Coil”), 3 och 4 med funktion 6 (”Write Single Register”). Om värdetypen är 32-bittars sker dock alltid skrivning med kod 16 (”Write Multiple Registers”).
MR Modbus konf
En meny för inställningar om själva modbus-slingan
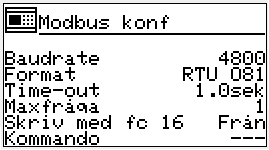
Baudrate
9600, 19200 eller 38400 baud. Bit-hastigheten för kommunikation på Modbus-slingan.
Format
Byte-format på Modbus-slingan. Paritetskontroll (N: ingen, E: jämn, O: udda), antal bittar data (8 för Modbus RTU, 7 för Modbus ASCII), antal stopp-bittar (1 om paritet, 2 om ingen paritetskontroll).
Time-out
Max tid för fullt svar på en fråga.
Maxfråga(endast Modbus-master)
Max antal register som kan efterfrågas på en gång. COM1112 försöker få med flera värden i en fråga om det är möjligt utan att antalet register i frågan blir större än inställt max.
Skriv med fc 16
Vissa slavar accepterar endast kommando för skrivning av flera värden (fc 16), även om bara ett värde ska skrivas. Denna parameter Till ger sådan skrivning för samtliga slavar. Kommando Kommando till Modbusfunktionen. T ex spara kommunikationslogg.
MG Modbus Gateway
Varje GW kopplar en modbusadress (se MV) till en IP-adress för Modbus TCP. En modbus-duc kan alltså koppla sig direkt mot en gateway, eller mot en slavenhet med Modbus TCP.
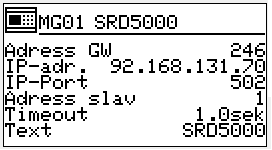
Adress GW
Modbus-adress som matchar denna Gateway. Om denna adress ställs in i en MV, används detta GW-objekt för kommunikationen.
IP-adr.
IP-adress till enhet/gateway. Siffror eller värdnamn.
IP-Port
TCP-port att använda för uppkoppling. 502 är standard.
Adress slav
Modbus-adress, så som det är inställt i slaven.
Timeout
Max tid för att få svar från slav.
Text
En text som beskriver objektet. Visas längst upp på sidan.
RD Radio (Z-Wave)
KTC Radionoder bygger på Z-Wave som är en internationell standard för trådlös kommunikation i smarta hem.
Då RD används för att läsa in mätarställningar finns en funktion för att minska antalet felläsningar. Ett enstaka värde mindre än det tidigare, eller mycket större (+20% eller 1000) accepteras inte.
Meny RD Radio data Vilka data som presenteras beror på vilken typ av mätarnod som är ansluten. I exemplet nedan har vi anslutit en rumstemperaturgivare via radio till KTC-enheten.

Värde
Senaste värde levererat av ansluten radionod.
2013-01-08
09:05:05
Datum och tid då senaste värdet levererades till RD från ansluten radionod.
XData1-3
Värde ett till tre från nod*
Nuv. tim
Förbrukning pågående timmen.
Ex: om kl. är 13.25, => förbruk. 13.00–13.25
Nuv. Dag
Förbrukning pågående dygn.
Ex: om kl. 13.25 22/8, => förbruk. 00.00-13.25 22/8
Nuv. Mån
Förbrukning pågående månad.
Ex: om 22 augusti, => förbruk. 1/8-22/8
För. Tim
Förbrukning förgående hela timmen.
Ex: om kl. är 13.25, => förbruk. 12.00–13.00)
För. Dag
Förbrukning förgående hela dygn.
Ex: om kl. 13.25 22/8, => förbruk. 00.00-24.00 21/8
För. Mån
Förbrukning förgående månad.
Ex: om 22 augusti, => förbruk. Juli, 1/7-31/7
Mätarid
Här visas till RD01 ansluten givares/nods ID-nummer. Ofta givares/nods Sn/Nr.
Typ
Internt KTC, förklara vilket typ av nod som levererar värde.
Version
Version på mjukvara i radionod.
SN
Här visas till RD01 ansluten givares/nods Serienummer om detta finns konfigurerat.
Batteri
Visar batteristatus i ansluten givare/nod.
*En radionod kan ha upp till 4 värden. En tempgivare har bara ett, men en KTC vattenmätare har fler värden, andra tredjepartsenheter kan också ha flera värden. T ex kan en elektrisk switch också ha ett mätvärde för effekt och/eller energi. Dessa värden kallar vi XData 1-3.
RM Meny Radio
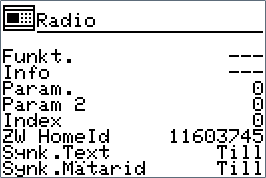
I meny Radio konfigureras gemensamma parametrar för hela radionätet.
Funktioner
Parametrar för avläsning och konfigurering av radioenhet.
- (- - -): Normalläge
- Ta bort: Ta bort/nollställ radionod.
- Lägg till cont.: Koppla tillfälligt in installationsverktyg (X*)
- Skicka NodeInfo:
- Reset radio: Nollställ radiomaster
- Flytta: Flytta en radionod från RD-objekt Index till Param
- Läs HomeId: Läs ut aktuell HomeId från Radiomodul
- Skriv HomeId: Skriv ny HomeId from Param, till radiomodul. Innebär reset av hela nätet.
- Läs Kompetenser: X*
- Sätt namn : Skriv namn till radionod Index, enligt vad som är inställt under meny RD-objekt
- Sätt plats: Skriv plats till radionod Index, enligt vad som är inställt under meny RD-objekt
- Radiotest: Be mätaren att skicka ett antal testmeddelanden med reducerad styrke. För test av förbindelse.
- Lägg till: Lägg till ny nod som RD Index. Samma som under RD-objekt.
- Läs data: Försök att läsa ut data från nod Index.
- Ersätt: Ersätt en nod, RD Index om den inte längre fungerar. Samma som under RD-objekt.
- Kassera: Ta bort nod RD Index. Används då noden inte längre fungerar, och vanlig borttagning därför inte är möjlig. Samma som under RD-objekt.
- Räckvidd: Testa radiokontakten men en nod, genom att sända ett antal meddelanden med reducerad effekt. Samma som under RD-objekt. Här kan dock antal sändningar ställas in, och effektreducering i fler steg. Resultat som antal lyckade försök.
- Läs konf: Speciella inställningar i en nod kan läsas ut. Nod RD Index, konfigurationsparameter nummer Param 2. Resultat kommer i Param.
- Sätt konf: Speciella inställningar i en nod kan göras. Nod RD Index, konfigurationsparameter nummer Index, nytt värde i Param.
Info
Visar åtgärd/resultat på någon av ovan åtgärd.
Param
Tal som skall skickas till mätnod. T.ex. en mätarställning
Param 2
Index
ZW Homeid
Identitetsnummer på det radionät som radiosändare och alla till sändaren anslutna radionoder tillhör.
Synk. Text
Normalt sätts Ramtexten till radionodernas konfigurerade namn och texten Plats till radionodens konfigurerade Plats. Den kopplingen kan tas bort för alla radionoder tillsammans,genom att sätta Synk. Text till Från.
Synk. Mätarid Normalt sätts mätarid till nodens tillverkningsnummer. Den kopplingen kan tas bort genom att sätta Synk.Mätarid till Från.
X* Avancerade konfigurerings parametrar som inte används i en normal installation.
Meny Radio, konfigurering av mätnod
Ta bort: Ta bort en radionod
- 1.Markera raden Funkt, tryck på redigeringstangenten och scrolla till parametern Ta bort.
- 2.Tryck på tangenten OK.
- 3.Info: Tryck, tryck på radionodens serviceknapp. Info bekräftar med OK om borttagningen gått bra. Om Info: Time Out, börja om på steg 1.
Lägg till cont: Aktivera fjärranslutningsinstrument.
- 1.Markera raden Funkt, tryck på redigeringstangenten och scrolla till parametern Lägg till cont.
- 2.Tryck på tangenten OK
- 3.Info: Tryck, tryck på fjärranslutningsinstrumentets aktiveringsknapp. Info bekräftar med OK om aktiveringen gått bra. Om Info: Time Out, börja om på steg 1.
- 4.När installationen är klar, glöm ej ta bort fjärranslutningsinstrumentet från radionätet. Detta görs på samma sätt som man tar bort en radionod. Se avsnitt Ta bort en radionod.
Reset radio: Rensa Radionät.
-
- Markera raden Funkt, tryck på redigeringstangenten och scrolla till parametern Reset radio.
-
- Tryck på tangenten OK.
-
- Info bekräfta med OK. Om Info: Time Out, börja om på steg 1.
Flytta: Flytta en radionod mellan RD-objekt.
-
- Sätt Index till index för RD som skall flyttas från.
-
- Sätt Param till index som skall flyttas till.
-
- Sätt funktion till "Flytta", tryck OK.
Sätt namn: Ge radionod ett namn.
- 1.Gå till meny RD-objekt för den radionod som skall döpas.
- 2.Scrolla ner till Namn.
- 3.Tryck på penntangent och skriv in namn på RD. Bekräfta med OK-tangenten.
- 4.Scrolla till Funktioner. Tryck på penntangenten, scrolla till Sätt namn.
- 5.Tryck på mätnodens serviceknapp 3 gånger.
- 6.Tryck på OK-tangenten, om allt gått bra visar Info OK. Om Info: Time Out har konfigureringen misslyckats, börja då om på punkt 4 ovan och försök igen.
Sätt plats: Beskriv en radionods placering
- 1.Gå till meny RD-objekt för den nod som skall få en plats angiven.
- 2.Scrolla ner till Namn.
- 3.Tryck på penntangent och skriv in namn på RD. Bekräfta med OK-tangenten.
- 4.Scrolla till Funktioner. Tryck på penntangenten, scrolla till Sätt Plats.
- 5.Tryck på mätnodens serviceknapp 3 gånger.
- 6.Tryck på OK-tangenten, om allt gått bra visar Info OK. Om Info: Time Out har konfigureringen misslyckats, börja då om på punkt 4 ovan och försök igen.
Att läsa av parameterinställningar i en nod 1. 1.Skriv in nodens index på Index. 2. 2.Skriv in parameternummer under Param 2. 3. 3.Gå till funktion, tryck penna och piltangent upp tills Läs konf. Kommer upp. 4. 4.Väck noden (tre tryck på knappen) 5. 5.Tryck OK. Resultatet kommer som Param.
Meny RD-objekt
I RD-objekts meny lägger du bl.a. till, kasserar och ersätter nya och/eller gamla mätnoder.
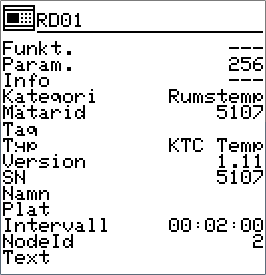
Funktioner
Parametrar för avläsning och konfigurering av radionod.
- ---: Normalläge
- Lägg till: Installera ny radionod.
- Sätt Mätarst: Skicka mätarställning till radionod.
- Sätt Villkorl.: Sätt villkorad mätarställning i en KTC Pulsgivare (XData 1).
- Läs Mätarst.: Läser av mätarställning i radionod.
- Läs Villkorl.: Läs av villkorad mätarställning i en KTC pulsgivare (XData 1).
- Ersätt: Ersätt en trasig radionod med en ny.
- Kassera: Ta bort en trasig radionod.
- Räckv. 50 %: Gör räckviddstest med ca halv effekt.
- Räckv. 10 %: Gör räckviddstest med ca 10% av effekt
- Läs sänd-diff**: Temperaturförändring/antal pulser som skall uppdatera RCU. Se Bilaga 2
- Läs min: Läser lägsta temperatur.
- Läs max: Läser högsta temperatur.
- Läs KV-temp: X* Inställnning i KTC puls, för energiberäkning.
- Läs VV-gräns: X* Inställnning i KTC puls, för energiberäkning, och för villkorlig förbrukning.
- Läs Energi: X* KTC puls: fiktiv energi, utifrån temperatur och volym VV
- Läs medd. Räkn: Se bilaga 1
- Läs status: Felsökning, visar nodens status.
- Reset MM: Nollställer högsta/lägsta temperatur (KTC temp)
- Sätt sänd-diff: X* (KTC temp) sätt temperaturförändring för att trigga en sändning av data.
- Sätt KV-temp: X* (KTC puls) Sätt uppskattad inkommande kallvattentemperatur för energiberäkning.
- Sätt VV-gräns: X* (KTC puls) Sätt temperaturgräns för villkorligt flöde och energiberäkning.
- Sätt Energi: X* (KTC puls)
- Läs data: X* Fråga av radionoden efter data. Observera att batterinoder normalt inte lyssnar.
- Sätt namn: Ger radionod ett namn
- Sätt plats: Skriv in var radionod är placerad
Param.
Tal som skall skickas till radionodnod. T.ex. en mätarställning
Info
Instruktion om/svar på utförd konfigurering.
Kategori
Typ av medium som mäts
Mätarid
Radionods ID-nummer
Tag
Möjlighet till tekniskbeskrivning av RD-objektet.
Typ
Typ av radionod.
Version
Version på mjukvara i radionod.
SN
Radionods serienummer
Namn
Konfigurerat namn på radionod
Plats
Konfigurerad placering av givare.
Intervall
För nätmatade, lyssnande noder: hur ofta data uppdateras.
Node Id
Noden tekniska adress i ZW-nätverket (för info, bra att veta om man använder avancerade verktyg).
Text
Ramtext, visas högst upp på menysidan, på raden efter RD01.
X* Avancerade konfigurerings parametrar som ej används i en normal installation. Förklaras i bilaga.
Några operationer på en radionod
Lägg till: Lägg till radionod.
- 1.Scrolla med piltangent till det RD-objekt som radionod skall läggas till i.
- 2.Scrolla och markera Funktioner. Tryck på penntangenten, scrolla till Lägg till.
- 3.Tryck på OK-tangenten, Info: Tryck. Tryck på radionodens serviceknapp.
- 4.Om allt gått bra skall info visa OK. Om Info: Time Out har installationen misslyckats, börja då om på punkt 2 ovan och försök igen.
Sätt Mätarst: Konfigurera mätarställning i mätnod.
- 1.Scrolla med piltangent till det RD-objekt där mätarställning skall konfigureras.
- 2.Scrolla ner och markera Param.
- 3.Tryck på penntangent och skriv in mätarställningen med piltangent, bekräfta med OK-tangenten
- 4.Scrolla till Funktioner. Tryck på penntangenten, scrolla till Sätt mätarställning.
- 5.Väck radionoden (tryck tre ggr på knappen).
- 6.Tryck på OK-tangenten, Info: Tryck. Tryck på radionodens serviceknapp.
- 7.Om allt gått bra skall inforaden visa OK. Om Info: Time Out har installationen misslyckats, börja då om på punkt 2 ovan och försök igen.
Ersätt: Ersätta en trasig radionod med en ny.
-
- Scrolla med piltangent till det RD-objekt där den trasiga radionoden är konfigurerad.
-
- Scrolla och markera Funktioner. Tryck på penntangenten, scrolla till Ersätt.
-
- Tryck på OK-tangenten, Info: Tryck. Tryck på den nya radionodens serviceknapp.
-
- Om allt gått bra skall Info visa OK. Om Info: Time Out har installationen misslyckats, börja då om på punkt 2 ovan och försök igen. Om det inte hjälper, kontrollera att den gamla noden verkligen inte svarar på anrop
Kassera: Ta bort en trasig radionod.
- 1.Scrolla med piltangent till det RD-objekt där den trasiga radionoden är konfigurerad.
- 2.Scrolla och markera Funktioner. Tryck på penntangenten, scrolla till Kassera.
- 3.Tryck på OK-tangenten.
- 4.Om allt gått bra skall Info visa OK. Om Info: Fel har avinstallationen misslyckats, börja då om på punkt 2 ovan och försök igen. Om det inte hjälper, kontrollera att den gamla noden verkligen inte svarar på anrop
Räckviddstest
- 1.Scrolla med piltangent till rätt RD-objekt.
- 2.Markera Funktioner, tryck Penna och välj ”Räckv. 50%” eller ”Räckv. 10%”.
- 3.Väck radionoden (tryck tre ggr på knappen).
- 4.Tryck OK. I Param visas hur många, av 10 försök, som gick bra.
VK Värde från Kom.
Hämtar önskat värde från t.ex. en utetemperaturgivare som är ansluten till en annan DUC. Denna DUC skall vara nåbar via IP, XMPP eller RS485, direkt eller via COM1245 (IP-modem).
Värde hämtas med inställt intervall. Lyckas detta inte görs omförsök. Efter 5 misslyckade försök övergår VK till inställningar vid kommunikationsfel.
Observera att signalen givarfel (gf) från en VK talar om ifall VK har aktiverat sitt kommunikationsfel. Detta behöver inte stämma med om VK har ett giltigt värde.
- Givarfelsvärde kan också hämtas från annan DUC.
- Hantering av kommunikationsfel kan ge ett giltigt utvärde.
För att få en givarfels-signal som verkligen handlar om giltigt värde, läs in VK i en AV, och använd givarfelsignal i AV.
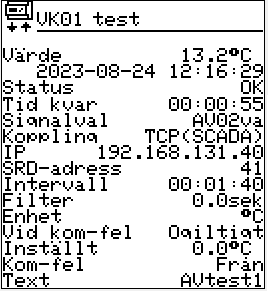
Värde
Värde som hämtats.
Datum och tid
Tid för senaste hämtning.
Status
Senaste status från denna VK. Kan anta följande värden:
| Status | Kommentar |
|---|---|
| Av | VK är avstängd |
| OK | Värde har kommit in, koppling fungerar |
| I kö | Fråga lagd i kö. Väntar på hantering av respektive protokoll. |
| TCP DNS | Domännamn kan inte översättas till IP-adress |
| TCP ansl | Uppkopplingsförsök TCP pågår |
| TCP ansl-fel | TCP-uppkoppling misslyckades |
| TCP minne | Inte minne till en TCP-session till |
| Mjukvara1 | Mjukvarufel (WrongState) |
| TCP skickat | Fråga skickad via TCP |
| Mjukvara2 | Mjukvarufel (BufferFull) |
| TCP sändfel | Kunde inte skicka TCP |
| TCP ackat | TCP-fråga har bekräftats av mottagare |
| TCP-fel | Felstatus TCP |
| TCP-timeout | TCP-överföring fick time-out |
| XMPP-fel | XMPP är inte i anslutet läge |
| XMPP skickat | Fråga skickad via XMPP |
| UDP minne | Inte minne till att skapa ett UDP-meddelande |
| UDP skickat | Fråga skickad via UDP |
| Mjukvara3 | Mjukvarufel (BuffChained) |
| RS485 skickat | Fråga skickad via RS485 |
Tid kvar
Tid till nästa hämtning. Kan skrivas vid behov. Skriv 0 för att trigga läsning direkt.
Signalval
Värde som skall hämtas. Skrivs som en text för största flexibilitet. Kräver att användaren skriver
rätt OOnnvv, Objekttyp, index och värde, två tecken vardera. Saknas värde antas "va".
Koppling
Hur kommunikationen sker. (Se nedan.)
IP
IP-nummer där den andra DUC:en kan nås. Om den nås via RS485 kan detta fält lämnas blankt.
SRD-adress
SRD Id-nummer/SRDLink2 adress på DUC som skall leverera önskat värde, vare sig det är via
RS485 eller via IP.
Intervall
Tidsintervall för hämtning av värde.
Enhet
Enhet på hämtat värde.
Vid kom-fel
Hur VK skall reagera på kommunikationsfel:
* Använd senast inlästa
* Använd det fördefinierade värdet
* Visa felvärde.
Inställt
Värde att använda vid kommunikationsfel om Vid kom-fel valts till fördef.
Kom-fel
Aktuell kommunikationsstatus. Till innebär Fel. Fyra hämtningar i rad har misslyckats.
Text
Ramtext, visas högst upp på menysidan, på raden efter VK01.
IP-adress, XMPP och IP-port Under Koppling kan man välja mellan UDP(DUC), TCP(SCADA), XMPP eller RS485. För att hämta data via XMPP, skriv in adress (s k JID) som IP-adress, inklusive domän (t ex ”[email protected]”). För UDP och TCP används normalt den port som ställts in under DUC:ens kommunikationsinställningar (DUC-DUC respektive SRD-port). Om man önskar hämta via annan port, lägg till ”:” efter IP-adressen följt av önskad port. T ex ”10.34.2.120:10102” (i version 4.7.xx fungerar inte just detta!)
System
LS Larmsändare
Här konfigureras sändningen av larm till överordnade system, Scada, OPC-server etc. Det går att välja vilka typer av larm som skall skickas och statusförändringar för dessa larm. Sändningen kan också förreglas med någon signal i systemet.
Varje LS kan ha olika aktuell status:
- Inaktiv: Inget att sända just nu.
- Sänder: Blinkar till kort då ett larmmeddelande läggs i sändningskön.
- Väntar: Larmmeddelande har sänts. Väntar på mottagningsbekräftelse, eller på att det är dags för nästa försök.
Vid status Sänder eller Väntar visas också vilket larmobjekt som just nu skall sändas.
LS 01
Larmsändare ett.
Status
Aktiv/Inaktiv. Om larmsändning sker eller ej.
Nuv. larm-obj.
Larm som håller på att bearbetas. När larmet sänts bearbetas nästa larm i sändningskön.
Typer
Vilka typer av larm som skall sändas.
- Inga, larmsändaren är bortkopplad
- Endast A-Larm.
- Endast B-Larm.
- A- och B-Larm.
- Alla, även C-Larm.
Händelser
Vilka statusförändringar som skall sändas.
- Nya: Endast då larm går från OK eller Aktivt.
- Nya + OK: Också då larm återgår till OK, både återgått och kvitterat.
- Nya + Kvitt + OK: Också då larm kvitteras.
- Alla: Också återgått skickas.
Försök
Hur många sändningsförsök per dag som skall göras. Klockan 08.00 varje dag nollställs räknaren. 0 (noll) innebär
obegränsat antal sändningsförsök
Fördröjning
Fördröjning mellan nya sändningsförsök.
Gjorda försök
Antal sändningsförsök hittills. Kan påverkas manuellt för att få systemet att göra ytterligare försök.
Tid kvar
Tid kvar till nästa sändningsförsök.
IP
IP-adress för mottagare. Kan vara av olika typ, exempel:
- 172.10.234.54: Fast IP adress. Larm skickas via TCP/IP till inställd adress och port.
- larm.minserver.se: Domännamn. Systemet letar upp IP-adressen via DNS, och skickar via TCP/IP till inställd port. Kräver att DNS är tillgänglig med aktuella nätverksinställningar.
- minopc@xmpp02: @-tecknet i texten innebär att den tolkas som en adress i XMPP. Kräver att systemet självt är anslutet via XMPP.
- Tom rad, namnet localhost eller med IP-nummer 127.0.0.1: Sändning sker via RS485.
IP-Port
IP-port om sändning sker via IP.
SRD-adress
SRD-id för mottagaren. Gäller samtliga typer av sändning.
Förregling
Digital signal som skall vara sann för att sändning skall ske. Ogiltig inställning
innebär att sändning sker.
Text
Ramtext, visas högst upp på menysidan, på raden efter LS01
Larmlista Via meny på förstasidan, larmsidan eller larmsändningssidan, kan >man komma till listan över aktiva larm. Där visas dels alla LS >som är aktiva, med vilket larm de just nu sänder tillsammans med >alla aktiva larm. För varje larm visas:
- Larm Text
- Larmande objekt, Larmtyp, Larmstatus
- Tid då larmet aktiverades
- Tid då larmet återgick/kvitterades.
Genom att markera kvittera, och trycka på OK-tangenten kvitteras >larmet. Genom att markera larmande objekt och trycka OK->tangenten kommer man till sidan för aktuellt larm.
RT Realtid
Här konfigureras enheten att, med satta intervaller, ta kontakt med en NTP-server och ställa sin realtidsklocka efter den. KTC-enheten kan också ta emot synkroniseringsmeddelanden via RS485.
Serv
Adress till server som tid hämtas från (NTP)
Port
Port som tiden hämtas via. (NTP)
Intervall
Hur ofta enheten frågar efter rätt tid (NTP)
Tidszon
Relativt GMT
Tidsynk
Hur klockan skall synkroniseras.
- Av eller RS485: Ingen aktiv synkronisering. Klockan måste ställas manuellt eller via skrivkommando.
- Auto eller NTP: Använder NTP om det finns IP-nätverk, i annat fall måste klockan ställas manuellt eller genom skrivningar via RS485.
- Server: Synkroniserar sig själv via NTP, och vidarebefordrar detta med skrivkommando över RS485 till andra KTC-enheter på samma RS485-nät.
För de flesta produkter är fabriksinställning här Auto. För COM1245 är den dock Server.
Klockslag
Visar senaste tid som ställdes in, via NTP eller på annat sätt.
Klockan
För att göra dataloggning måste systemet känna datum och tid. Normalt hålls tiden automatiskt uppdaterad via nätverket, men den kan också ställas manuellt. Systemets inbyggda tidur kan ställas under System/Realtidsklocka.
- Markera datum-/tidtexten genom att trycka på en piltangent.
- Tryck på Redigeringstangenten.
- Flytta markören med Pil Vänster/Höger.
- Ändra med Pil Upp/Ner.
Bekräfta med OK.
Veckodag behöver inte ställas in, den räknar systemet ut själv.
- Klockan ställer själv om sig till sommartid.
Om sommartid råder, används den för tider visade på display, t ex aktuell tid, tid för senast inkomna värde etc. I dataloggar används alltid normaltid.
SL Slav-DUC SL
En Slav-DUC innebär en möjlighet att fjärrstyra en annan DUC, alltså att få upp dess displaybild på den egna displayen, och med knappsatsen påverka den andra DUCen. Larmstatus läses kontinuerligt in och påverkar larm-LED. Om slaven tillhör MMC-familjen ("vita" DUC), skapas displayen lokalt med kunskap om slavens display-träd och fylls kontinuerligt på med data, på samma sätt som vid datainsamling (via SRDLink). För slavar från tidigare KTC produktserier ("gröna") görs en kopiering av displayinnehållet.
Koppling
Välj kommunikationsväg till slav: RS485, XMPP eller IP. Av innebär att SL-objekt inte är aktivt.
SRD-adress
SRD-adress för slaven (0-249)
IP
IP- eller XMPP-adress till slav. För RS485 kan fältet lämnas tomt.
IP-Port
För kommunikation via IP ställs porten in på slaven. Porten skall vara samma port som är inställt för ”DUC till DUC” på slaven.
Intervall
Intervall för uppdatering av slavstatus (larmstatus, RAM-text, version etc)
Text
Kopieras från slavens RAM-text, behöver inte skrivas in
KP Koppling
En koppling är en väg från en DUC kopplad via RS485 ut på internet, för att skicka larm eller för att hämta data. Varje koppling motsvarar en SRD-adress på RS485-nätet, och förbinder den med en IP-adress eller en XMPP-identitet, samt en SRD-adress som gäller ”där”, på andra sidan internet.
Anslutning
Anger om anslutningen är till en DUC, till SCADA, eller via XMPP (DUC eller SCADA). Om anslutningen är AV anses den inte vara använd.
IP
Adress på internet. IP-adress (t ex 192.168.0.4), värddatornnamn (t ex nissestyr.se) eller ett XMPP-namn (t ex haga_vader@xmpp02).
IP-Port
För anslutning DUC eller SCADA anges port att sända till. För SCADA normalt 10001, för DUC 10002.
SRD-adress här
Den SRD-adress som skall användas av DUCar på RS485-nätverket.
SRD-adress där
Den SRD-adress som kontaktas via internet.
Info
Meny Info har uppgifter om enhetens hård- och mjukvara. Uppgifterna på denna sida är bra att ha till hands när du behöver support på enheten.
SN SRD
Enhetens serienummer/tillverkningsnummer.
Typ
Enhetens modellbeteckning.
BasTag
Tagtext/Hostname. Här döper du enheten, texten visas på startsidan.
Lic
Licenskod för enhetens mjukvara.
Drifttid
Tid som gått sedan senaste omstart av enheten.
Version
Enhetens mjukvaruversion.
MAC
Enhetens MAC-adress.
Nätverk
DHCP
- Till: Nätverksinställningar erhålls automatiskt. Detta kräver att man är uppkopplad i ett nätverk, med en router. Nedanstående rader är då visning av aktuella inställningar
- Från: Du skriver själv in den IP-adress som skall användas. Nedanstående rader blir då inställningar som ska göras.
IP-Adr
Aktuell IP-adress.
Mask
Nätmask talar om vilka IP-nummer som tillhör det nätverk som enheten är kopplad mot.
GateW
Default Gateway, IP-adress för vägen ut på Internet.
DNS, DNS2, DNS3
IP-adress för DNS-servrar.
BasTag
Hostname, namn som DHCP använder för att identifiera enheten. Finns även med i meny Info.
SRD-port
Port för kommunikation med överordnat system via TCP/IP.
Fabriksinställning: 10001
DUC till DUC
Port som används för kommunikation med andra enheter i samma nätverk via UDP/IP.
Fabriksinställning: 10002.
WEB-port
På produkter med Websida
Fabriksinställning: 80
WEB aktiv
Om web-servern är aktiv eller inte. Servern ska bara vara aktiverad i säkra, skyddade,
nät för att inte riskera oönskad manipulation av produkten.
Fabriksinställning: Från.
Modbus-port
Port Modbus gatewayfunktion/slavfunktion. TCP.
Fabriksinställning: Port 502.
Modbus aktiv
Måsta vara Till för att systemet ska svara på frågor via Modbus.
Fabriksinställning: Från.
Uppgr-port
Port för uppgradering av mjukvaror via tftp ("Uploader_tftp"). Används normalt inte.
Fabriksinställning: Port 69.
M-Bus port
På produkter med M-Bus slavinterface
Fabriksinställning: 10003
M-Bus IP-port
På produkter med M-Bus slavinterface. Val mellan UDP och TCP.
Fabriksinställning: UDP
Tillfällig koppling mellan KTC-enhet och en PC För att tillfälligt kunna koppla upp sig mot en KTC-enhet (SRD, DUC, COM, RCU), om användbara nätverksuttag saknas, och aktuell IP-adress därför är okänd, kan följande göras:
- Koppla en vanlig IP-kabel mellan PCns nätverksuttag och DUCens
- Efter mellan 30 till 60 sekunder ändras aktuell adress till 192.168.0.5 på enheten och den nås nu på denna tillfälliga IP-adress, oavsett vilka inställningar den har. Inställningar kan nu göras på produkten, även nätverksinställningar kan ändras i detta läge utan att kontakten mellan PC och enheten tappas.
- Så fort kabeln dras ut ur PC eller enheten återställs IP-funktionen på båda till den normala
Detta förutsätter att PC:n är satt på automatiska nätverksinställningar, DHCP aktivt. I annat fall händer ingenting.
XMPP
XMPP är ett alternativt anslutningssätt för kommunikation som görs via en XMPP-server. Till skillnad från vanlig IP-baserad kommunikation, möjliggör XMPP att enheten blir nåbar genom en brandvägg, utan att inställningar normalt behöver göras i brandväggen. Med denna teknik kopplar enheten själv upp sig via XMPP-servern med ett användarnamn. Då behövs inte heller en känd nätverksadress. Överordnade system kommunicerar med enheten via ett känt XMPP-namn, en s k JID.
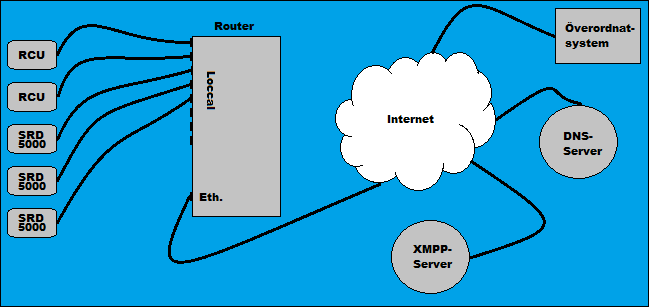
Status
Nerkopplad/Ansluter/Ansluten (Indikering).
Serv
Nätverksadress till XMPP-server. Om denna lämnas tom antas att
den är samma som inställningen för Domän.
Port
Port till server
Domän
Domän som för kontot
Anv.
Användarnamn för kontot.
Lösen
Lösenord för kontot.
Aktivera
Inställning för att ansluta XMPP. Till/Från
När XMPP är inställt och aktiverat kommer enheten att anslutas mot XMPP-servern vid uppstart. Detta visas genom att Status växlar mellan Nerkopplad och Ansluter. När enheten fått kontakt med XMPP-servern ändras status till Ansluten. Vid drifttagning konfigureras XMPP även om fastighetens nätverk inte är klart. Enheten kopplar då upp sig själv när nätverket är drifttaget.
RS485
För att bland annat kunna kommunicera med andra KTC enheter är de flesta produkter utrustade med RS485-bus. Via RS485 kan anslutna KTC-enheter låna värden och parametrar av varandra, oftast inom en byggnad. Detta innebär att om det t.ex. finns en utetemperaturgivare ansluten till en annan KTC-enhet kan man låna denna temperatur i sin programmering av andra KTC-enheter. Man behöver inte montera och ansluta ytterligare en utetemperaturgivare.
SRD-adress
Enhetens adress på RS485-Bus.
Hastighet
Kommunikationshastighet på RS485-Bus. För att kommunikationen via RS485 skall fungera är det viktigt att alla uppkopplade enheter har samma kommunikationshastighet inställd.
Test
För test av kommunikation med andra enheter på RS485-Bus. Ettan, adressen,
till höger om symbolen Test kan ändras till adress på den enhet kommunikation skall testas mot.
---
Indikerar OK efter test om kommunikation med vald enhet på RS485-Bus lyckades, annars Time Out.
Test av kommunikation på RS485
Kommunikationen på RS485-bus’en kan testas. Till höger om symbolen test ställer man in id (adress) för en annan ansluten enhet på RS485. Hastigheten på kommunikationen ställas in. Markerar symbolen Test och tryck OK på enhetens tangentsats. De tre strecken längst ner försvinner, och ersätts av OK om det gick bra, TIMEOUT om det inte kom något svar.
SRD/RCU/COM
Typ
Enhetens Typbeteckning
Konfig
En fri text som kan användas för att beskriva aktuell konfiguration av enheten.
Logginterval:
Hur ofta mätvärden och andra data loggas. 10/15/20/30/60 minuter.
BasTag
Enhetens namn/Hostname
Kommando
- Omstart: SRD/RCU/COM KTC-enheten gör en omstart
- RS485-test: Ingen funktion, testet görs i RS485 menyn.
- Sätt i auto: Sätter alla handställda objekt i auto.
- Rensa minnet: Rensar hela parameterminnet. Inte så farligt som det låter, men oftast helt onödigt.
- Larmdubbl: Använd endast efter kontakt med KTC support.
- Fixa MAC: Använd endast efter kontakt med KTC support.
Lösen LARM
Inloggningslösen för larmkvittering. Se nedan.
Lösen FAST.SK
Inloggningslösen Fastighetsskötare. Se nedan.
Lösen DRIFT
Inloggningslösen Drifttekniker. Se nedan.
Lösen SERVICE
Inloggningslösen Servicetekniker. Se nedan.
Tidsynk
Beskrivs under Realtidsklockan.
Text
Ramtext för enheten, visas högst upp på menysidan, på raden efter SRD/RCU/COM, och överst på startsidan.
Anp. startsida
Om Till letar systemet efter en fil som heter ”dsppages.xml”. Det ger en möjlighet att definiera
vad som ska visas på displayens första sida för just den aktuella DUC:en.
Larm Autoreset
Om Till kommer alla larm att bete sig som C-larm, och automatiskt kvittera sig själva då de
återgår. Detta betyder att också larmflaggor nollas, vilket kan påverka programmeringen.
Funktionen finns för att den kan passa bra tillsammans med vissa scada-system,
som själva vill hantera kvittering.
Från version 4.9.14 kan detta också vara en värdereferens. Om man t ex kopplar inställningen till
en tryckknapp så kan denna användas för att enkelt kvittera alla larm som återgått.
Inloggning/Lösenord
För att kunna konfigurera enheten måste du vara inloggad på rätt behörighetsnivå. Den förinställda nivån i enheten är Användare och behöver inget lösenord. På denna nivå kan du inte utföra några ändringar utan endast läsa vissa värden och parametrar.
Inloggning kan göras på en del olika sidor i menyträdet
Att logga in:
- Markera login med piltangenterna.
- Tryck på redigeringstangenten, för att hamna i redigeringsläge. Välj lösenord för den nivån du vill logga in. Om du ändrat lösenordet, skriver du in det nya lösenordet. T ex för service.
Om vi antar att lösenordet är "1289": Med upp får du fram första 1, höger kopiera 1 till 2:a platsen, upp ändrar till 2, höger kopierar 2 till 3:e platsen. ner 4 ggr ändrar 2 till 8. höger kopierar 8 till 4:e platsen. upp en gång ändrar till 9. OK och du är inloggad med lösenord "1289".
Beroende på vilken KTC-enhet som används kan man i meny System/Installation/SRD, RCU altenativt COM, enkelt ställa om lösenord upp till den nivå ditt inloggade lösenord ger dig behörighet. Om ett lösenord sätts till 0, kommer enheten att vara inloggad på denna nivå fram till ett nytt lösenord som börjar på någon av siffrorna 1-9 skrivs in.
Om du ändrar lösenord i enheten, var noga med att dokumentera det nya. Lösenord är ett tal med upp till 8 siffror.
Om du inte känner till fabriksinställning för de olika lösenorden, kontakta KTC. Skulle du ha ändrat lösenordet och förlorat det, går det också att få ett tillfälligt lösenord från oss och med hjälp av detta logga in och ställa om lösenorden. Innan du kontaktar oss notera aktuellt datum på KTC-enheten (ifall klockan skulle gå fel) för att få rätt tillfälligt lösenord.
| Nivå | Kortnamn | Beskrivning |
|---|---|---|
| Larm | LARM | Kvittera larm |
| Fastighetsskötare | FAST.SK | Kvittera larm, ändra börvärde (ej ändra förskjutningar och kopplingar) och ändra TU |
| Drift | DRIFT | Kvittera larm, ändra börvärde (ej ändra kopplingar) och ändra TU |
| Servicetekniker | SRV | Som drift, men man kan också ändra kopplingar mellan objekt (Gäller ej EC2) |
Alla nivåer har en inställning för lösen från fabrik. Vi väljer att inte skriva dem här, men KTC kan ge dig dem. Om du själv är på KTC, titta på supportcenter.
Konfigurationer SRD, COM och RCU
Man kan hantera samtliga inställningar i systemet tillsammans som en konfiguration. På sidan Konfigurationer finns knappar för att skapa och aktivera konfigurationer. Det finns också en knapp för att ladda fabriksinställningar. Konfigurationerna heter A, B, C eller D. De kan också vara förinstallerade från KTC. Då en konfiguration läses in, påverkas inte kommunikationsinställningarna. Konfigurationerna lagras i enhetens filsystem, som en s k dat-fil. Dessa filer är kompatibla med Automate. Man kan alltså skapa konfigurationer i Automate, ladda upp dem till enhetens filsystem (PLCFileTransfer), och sedan välja att aktivera dem vid ett senare tillfälle, t ex som enheten ska ha alternativa användningar som ska väljas i fält. Motsvarande kan man ladda hem konfigurationsfiler, och ha dem som utgångspunkt för sitt arbete i Automate.
Kugghjulssymbolen visas så länge enheten arbetar med att läsa in eller spara en konfiguration.
Fabr
Ladda fabriksinställningar
Ladda
Knapp visas bara om konfigurationsfilen existerar. Den senast laddade eller sparade filen markeras
med ett streck under Ladda-knappen.
Spara
Knappar för att spara en konfiguration under angivet namn (A-D).
Konfigurationer EC2
Man kan hantera samtliga inställningar i systemet som en konfiguration. På sidan Konfigurationer finns knappar för att aktivera konfigurationer. Konfigurationerna kan heta A, B, C, upp till H . De kommer förinstallerade från KTC. Då en konfiguration läses in, påverkas inte kommunikationsinställningarna.
Kugghjulssymbolen visas så länge enheten arbetar med att läsa in eller spara en konfiguration. Knapp visas bara om konfigurationsfilen existerar. Den senast laddade eller sparade filen markeras med ett streck under Ladda-knappen.
EXA & EXD
Till KTC-enheten SRD5000 finns två typer av expansionsenheter, EXA01 och EXD01. Enheterna ansluts via CAN-Bus. Fyra EXA01 och fyra EXD01, totalt åtta stycken expansionsenheter, kan anslutas till SRD5000.
EXA01, som är en expansionsenhet för den analoga sidan, utökar de analoga in- och utgångarna med fyra universella ingångar, fyra analoga ingångar och fyra analoga utgångar. Två EXA01 kan anslutas till varje SRD5000. Totalt kan alltså en SRD5000’s analoga in- och utgångar ökas till 20 universella ingångar, 20 analoga ingångar och 20 analoga utgångar.
EXD01, som är en expansionsenhet för den digitala sidan, utökar de digitala in- och utgångarna med åtta digitala ingångar och fyra digitala utgångar. Fyra EXD01 kan anslutas till varje SRD5000. Totalt kan alltså en SRD5000’s digitala in- och utgångar utökas till: 36 st. digitala ingångar och 20 digitala utgångar.
Att tänka på är att de digitala utgångarna på SRD5000 är via triac’s, 24 VAC 0,5A, vilket gör dem lämpliga att använda då behov av snabba växlingar på utgångens status eftersöks. De digitala utgångarna på EXD01 är via relä, upp till 230 VAC.
Se också Tips och tricks rörande EXA/EXD
Inkoppling
För att enkelt kunna se var/hur en extern enhet, t.ex. en analog givare eller ett ställdon, skall anslutas mot KTC-enheten, finns en I/O lista med plintnummer i menyn. I/O-listan får du fram med menytangenten om du befinner dig på startsidan alternativt i menyn In & Utgångar.
Bilaga 1 Parametrar i en KTC Radionod.
| Parameter | Default | Enhet | Radionodtyper | Kommentar |
|---|---|---|---|---|
| Sänd-diff. Temp | 5 | 0,1°C | RTS100-RF Rumsgivare, OTS100-RF Utetemperaturgivare, CTS200-RF Anliggningsgivare Temperatur | |
| Sänd-diff. Puls | 10 | 1 Liter | CPC200-RF Pulsräknare | |
| Medd. räkn. | - | 1 | RTS100-RF Rumsgivare, OTS100-RF Utetemperaturgivare, CTS200-RF Anliggningsgivare Temperatur, CPC200-RF Pulsräknare | Antal skickade datameddelanden mellan sändare och mottagare sedan senaste avläsning.(Nollas vid avläsning). |
| Status | 0 | - | RTS100-RF Rumsgivare, OTS100-RF Utetemperaturgivare CTS200-RF Anliggningsgivare Temperatur CPC200-RF Pulsräknare | Bitmönster som berättar om nodens status. För felsökning. |
| Min | - | 0,1°C | RTS100-RF Rumsgivare, OTS100-RF Utetemperaturgivare, CTS200-RF Anliggningsgivare Temperatur | Lägsta uppmätta temperatur. |
| Max | - | 0,1°C | RTS100-RF Rumsgivare,OTS100-RF Utetemperaturgivare, CTS200-RF Anliggningsgivare Temperatur | Högsta uppmätta temperatur. |
| Reset MM | - | - | RTS100-RF Rumsgivare, OTS100-RF Utetemperaturgivare, CTS200-RF Anliggningsgivare Temperatur | Sändning av (Sänd konf) 1:a återställer min och max-temperatur. |
| KV-temp | 10 | 1°C | CPC200-RF Pulsräknare | Uppskattad inkommande kallvattentemperatur, för energiberäkning. |
| VV-gräns | 40 | 1°C | CPC200-RF Pulsräknare | Temperaturgräns för villkorligt flöde och energiberäkning. |
| Total | - | L | CPC200-RF Pulsräknare | Total förbrukning. (Fysisk mätarställning) |
| Villkorl. | - | L | CPC200-RF Pulsräknare | Förbrukning då temperaturgivaren uppmätte mer än ”VV-gräns” vid pulstillfället. |
| Energi | - | Wh | CPC200-RF Pulsräknare | En mycket grov energiberäkning, gjord genom att använda inställd kallvattentemperatur och uppmätt varmvattentemperatur vid varje pulstillfälle (liter). Räknar bara då temperaturen överstiger VV-gräns. |